
一垄双行深施肥机的设计与试验
2018-04-12 00:52吴雪梅张富贵符德龙何厚龙
农机化研究 2018年4期
李 绪,吴雪梅,张富贵 ,符德龙,何厚龙,聂 尧
(1.贵州大学 机械工程学院,贵阳 550025;2.贵州省烟草公司毕节市公司,贵州 毕节 551700;3.贵州省烟草公司黔西南州公司,贵州 兴义 562400)
0 引言
烟草是贵州的主要作物之一,种植模式一般采用单垄单行,起垄和施肥等作业依次完成。一方面,在贵州山区烤烟由坡地向平坝地、土烟向田烟转移的背景下,该方式实际操作费工费时、劳动强度大、作业效率低,并且会增加机器进地次数,破坏土壤物理结构,使地面坚实度增加,不利于机械化推广[1]。另一方面,该方式生产投入大,土壤利用率低,单位土地面积的经济效益不高、烟叶质量不稳定。对机械化施肥水平不高的贵州来说,烟草施肥环节常常由人工施肥或简单机械施肥,施肥方式的粗放和施肥量的不均常常导致烟草作物烧苗或营养缺失,肥效利用率低,长期会导致土壤肥力失衡和土壤板结[2]。化肥的浅施常导致化肥挥发、肥效利用率低,不利于作物根系对养分的吸收,达不到增产增收的效果。在已开展的精准施肥技术方面,主要是基于GIS处方图的精准施肥技术研究,但对于贵州山区来说难以生成和共享精准处方图[3-4]。
针对以上问题,项目组提出将一垄双行种植模式、烟草深施肥技术和精准施肥技术应用于贵州烟区,以解决烟草种植起垄、施肥环节存在的问题。在此基础上,设计了一款适用于贵州平坝地区的一垄双行深施肥机械,并匹配安装了精准施肥控制系统,使拖拉机行速与施肥量相关连,可以一次性起垄,同时对两垄烟精准深施肥,实现农机与农艺的有机结合,如图1所示。通过田间试验验证其可行性,以达到相应生产环节省工、降本、增效的目的。
1 一垄双行深施肥机的设计
1.1整体结构与工作原理
机具主要由变速箱、机架、刀滚、起垄装置、施肥装置、肥箱、悬挂装置、覆土轮等部件构成。机具与拖拉机通过三点悬挂装置连接,拖拉机带动机具前进且通过万向节传递动力到旋耕刀轴并使其旋耕土壤。机具行走时,固定在拖拉机后轮上的速度传感器将采集机具速度信号;控制系统则将机具行进速度与排肥直流电机转速进行匹配,达到精准施肥的效果[5]。调节左右两根排肥管的距离和施肥深度,排肥轴在直流电机带动下进行排肥,同时机架后方的起垄板起垄并由连接在机架后方的可调拖板刮平垄顶,一次性完成旋耕、起垄及施肥作业过程。该机具结构简图如图2所示。
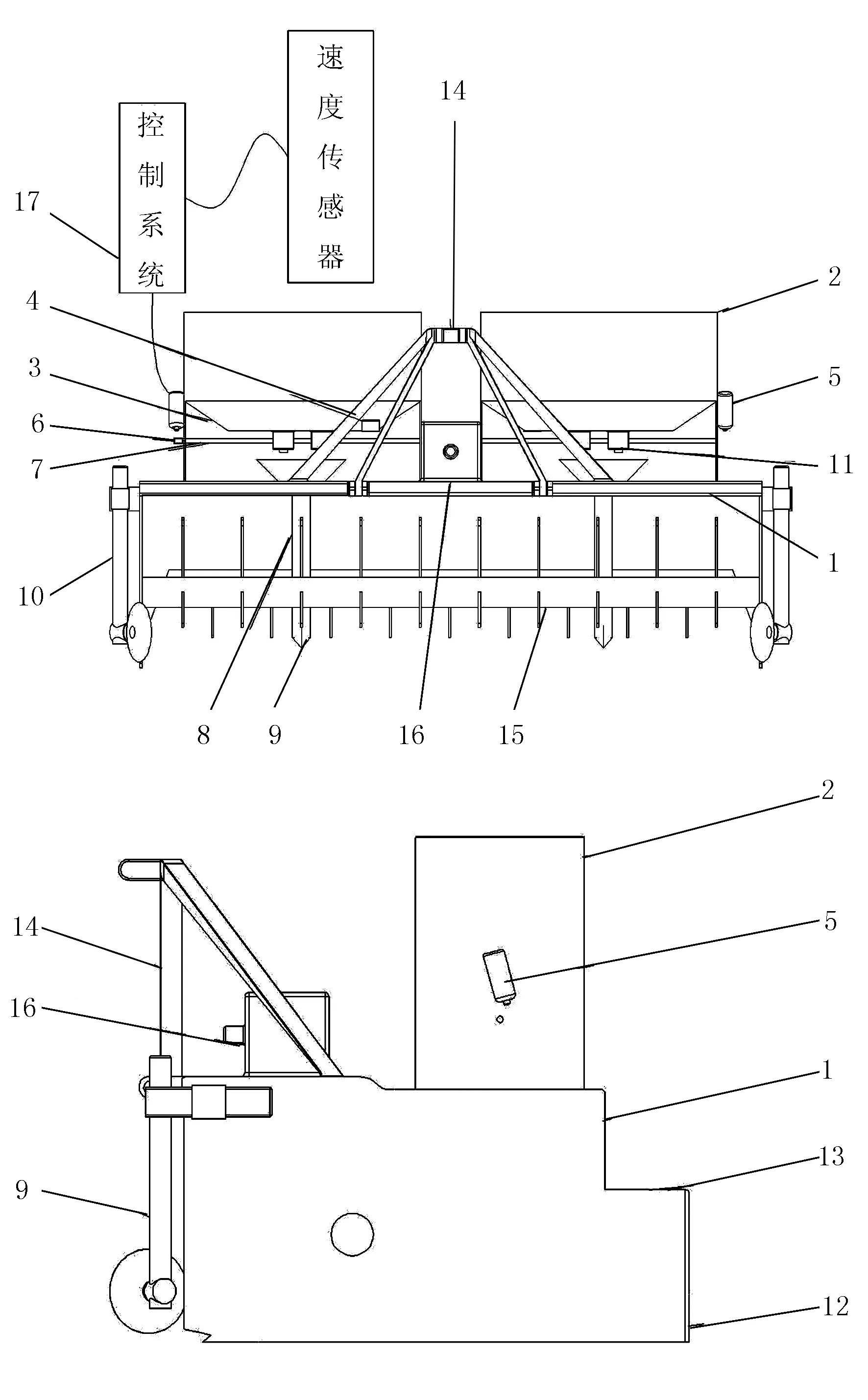
1.机架 2.肥箱 3.斜板 4.取肥口 5.直流电机 6.转速传感器 7.排肥轴 8.排肥管 9.开沟器 10.覆土轮 11.外槽轮 12.起垄器 13.可调拖板 14.悬挂架 15.刀滚 16.变速箱 17.控制箱图2 一垄双行深施肥机结构简图
1.2一垄双行深施肥机的主要技术参数
一垄双行深施肥机主要技术参数如表1所示。

表1 一垄双行深施肥机主要参数

续表1
2 一垄双行深施肥机主要部件的设计
2.1起垄成型装置
起垄成型装置主要由两侧呈对称分布的起垄刮板、高度调节器和垄面刮土板构成[6],如图3所示。机具前进时土壤被耕松,后方起垄刮板起垄并由垄面刮土板刮平垄顶,形成饱满的垄体和平实的垄面,为后期的烟草种植和管理提供了条件。
该装置应在确保农艺要求的前提下深耕和充分垄土,从而实现化肥深施。旋耕刀旋耕土壤深度会影响垄土量和施肥深度,其条件为
其中,H为旋耕深度(cm);L1为垄顶宽(cm);L2为机架长度(cm);W为边缘宽度(cm);D为起垄高度(cm)。
根据上式和农艺要求,在施肥深度不变的情况下,垄底宽和垄顶宽越小越容易满足足够的垄土量,达到深施肥的效果。综合以上因素,并结合试验测试,取垄顶宽L1为130cm,L2为190cm,W为10cm,起垄高度D为30cm。根据上式,旋耕深度为H=23.68cm,取H=25cm,以满足化肥深施条件。旋耕深度25cm可获得30cm的垄高、25~30cm施肥深度。

1.高度调节器 2.垄面刮土板 3.起垄刮板
2.2排肥控制系统
2.2.1排肥系统的构成
传统排肥装置采用普通地轮驱动排肥轴,受土壤湿度等情况的影响,滚轮易下陷和打滑,传动比波动大,可靠性差,对施肥均匀性和排肥一致性产生较大偏差[7]。基于以上情况,本文设计了排肥控制系统,确保排肥量的精确。
该系统主要包括控制系统、直流电机、12V车载直流电源及外槽轮排肥器等主要部分,系统结构简图如图4所示。

1.肥箱 2.移速传感器 3.拖拉机后轮 4.拖拉机驱动轴 5.24V直流电机 6.涡轮蜗杆 7.排肥器 8.排肥轴
2.2.2排肥系统控制流程
PLC控制电路通过采集机具行进速度和已设定的排肥量,经计算得出所需要的脉冲数,将这个脉冲数输入直流电机驱动器,控制电机转速,进而控制排肥量的大小,按需输出肥料[8]。由于不同地域土壤肥力的不同,在触摸屏上可选手动或者自动施肥模式控制施肥量大小。控制器采用西门子CPU 224xp型PLC,接由拖拉机蓄电池提供的12V直流电源[9]。施肥作业控制系统接线电路和流程如图5所示。
排肥器是机具施肥的重要工作部件,在直流电机的驱动下将料箱肥料排出。由于现有排肥器比较成熟,故直接选用外槽轮排肥器,结构简单,施肥均匀性较好,适用于排流动性较好的松散化肥和复合颗粒。


图5 控制系统流程图和接线图
2.2.3施肥决策函数的确定
施肥决策函数的确定选择在硬地面进行调试。烟草施肥量为675kg/hm2,根据烟草株距换算后选取2.8kg/30m进行调试验证。作业时,机器前进速度一般不超过2m/s,将肥料用收纳袋收集称重并测出机具平均移速,反复调整电机转速,以施肥误差小于5%(2.66~2.94kg)为指标得到22组不同时施肥量数据,以及施肥决策函数y=3.16443-0.65469x+0.45727x2-0.11684x3(见图6),并输入PLC。


图6 施肥决策函数的确定
3 田间试验与结果
3.1试验地条件
为检验样机作业性能,于2016年6月20日在贵州省毕节市黄泥塘烟草基地进行起垄施肥测试。试验区面积约1 400m2,测区为无茬田地。分别随机取测区上、中、下层土壤各两处,进行土壤含水率测定,如图7所示。
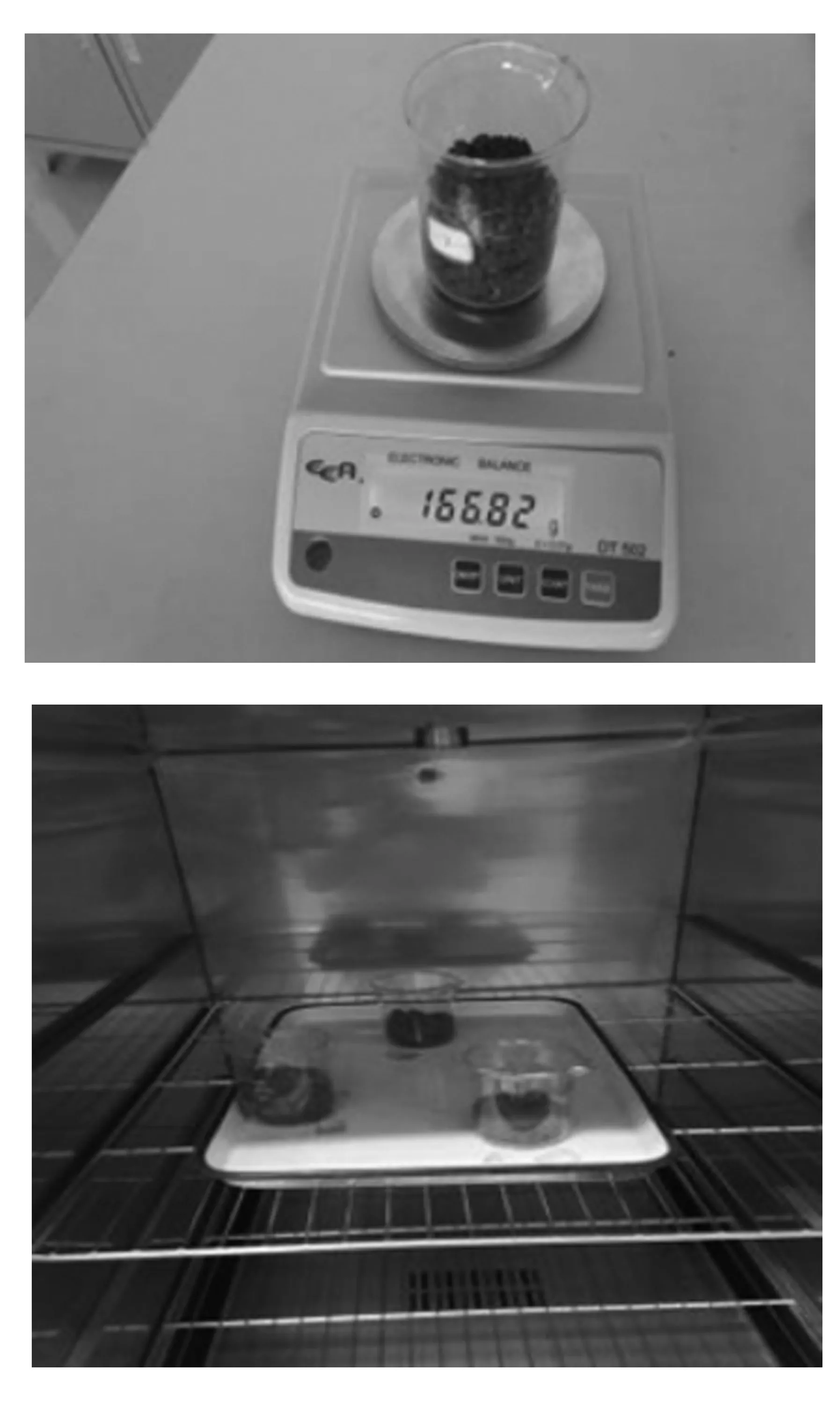
图7 土壤含水率测量
测量方法是用烧杯盛适量样本,用电子秤分别称量烘干前后土壤的质量,计算土壤绝对含水率,即

式中m1—烘干前土样及烧杯质量(g);
m2—烘干后土样及烧杯质量(g);
m—烘干后烧杯的质量(g)。
经计算,土壤耕层平均绝对含水率为17.46%,适合起垄与施肥的作业环境。
试验用肥为无机复合肥,采用耕王RM-804拖拉机悬挂式起垄施肥机测试起垄施肥参数。样机试验现场如图8所示。

图8 样机试验现场
3.2试验设计与方法
试验前使用石灰粉划分4处测区范围。依据国家标准《GB/T5262-2008农业机械试验条件、测定方法的一般规定》,在每个测区内随机选择5个点作测点。调整机具至烟草种植要求,以小于7km/h的速度前进,同时开启触摸屏自动施肥模式。由于起垄和施肥同时进行,试验前后称重肥料并记录差值。在每个测区测点处切开垄的断面,用卷尺和水平仪分别测量垄高、垄顶宽、垄基宽和施肥深度及施肥宽度。
3.3试验结果及分析
3.3.1垄高、垄顶宽及垄基宽
根据烟草种植标准要求,起垄形状为等腰梯形,调节垄高为30cm,垄顶宽为130cm,垄基宽为170cm。农艺要求为以上各项标准要求的±10%以内为合格。按下列关系式,分别计算垄高、垄顶宽、垄基宽变异系数,即
式中V—垄高、垄顶宽或垄基宽变异系数(%);
S—垄高、垄顶宽或垄基宽标准差(cm);

Qi—垄高、垄顶宽或垄基宽每次测量值(cm);
n—各指标测点数。
试验结果如表2所示。垄高、垄顶宽、垄基宽标准差分别为1.80、1.94、1.38cm,变异系数分别为6.4%、1.5%、0.7%,合格率分别达到92%、93%、98%,实际试验效果垄型较好,垄体饱满,垄面平实,完全满足起垄农艺要求。样机在试验过程中由于受到山地地面不平整因素的影响,故导致垄高变异系数偏大。垄基宽的变异系数略好于垄顶宽,其原因是在某些硬地段旋耕刀旋土量不足导致垄顶土量不足。
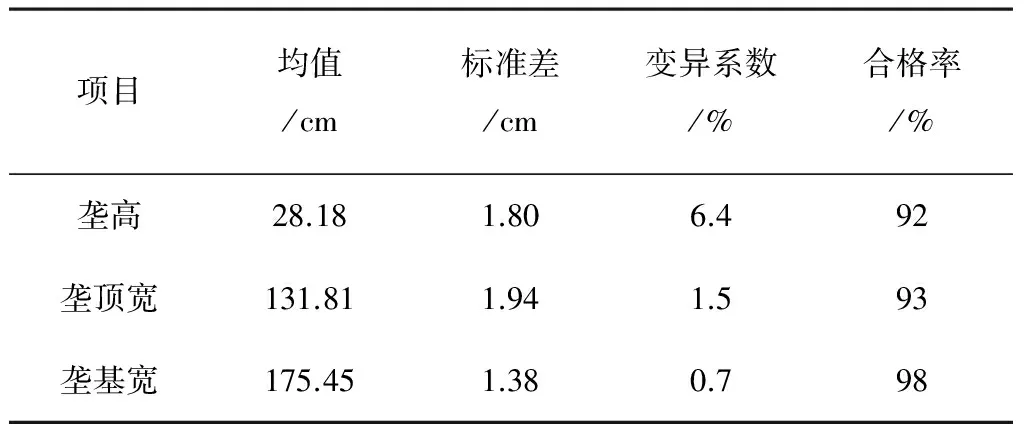
表2 一垄双行深施肥机起垄参数
3.3.2施肥偏差及效率
施肥均匀度测试在硬地面测试,地面铺设薄膜,机具调至适当高度以不同的速度反复行走4次,每个行程随机选取稳定区内的5个点进行均匀度测量。通过试验,测得施肥均匀性变异系数为12.28%,小于《贵州烟草农机评价指标体系》所规定的40%,性能达标,并且没有断条产生。这说明,整个控制系统准确度高,稳定性强。
施肥效率和施肥偏差的测定在试验田各测区进行,对每个测区计时并称量施肥前后肥箱内的肥料差值,得到各测区实际施肥量。田间实验数据如表3所示。由试验结果可知:该机具施肥效率高,施肥量偏差最大为4.58%,施肥精准度高,完全符合农艺农艺规程。
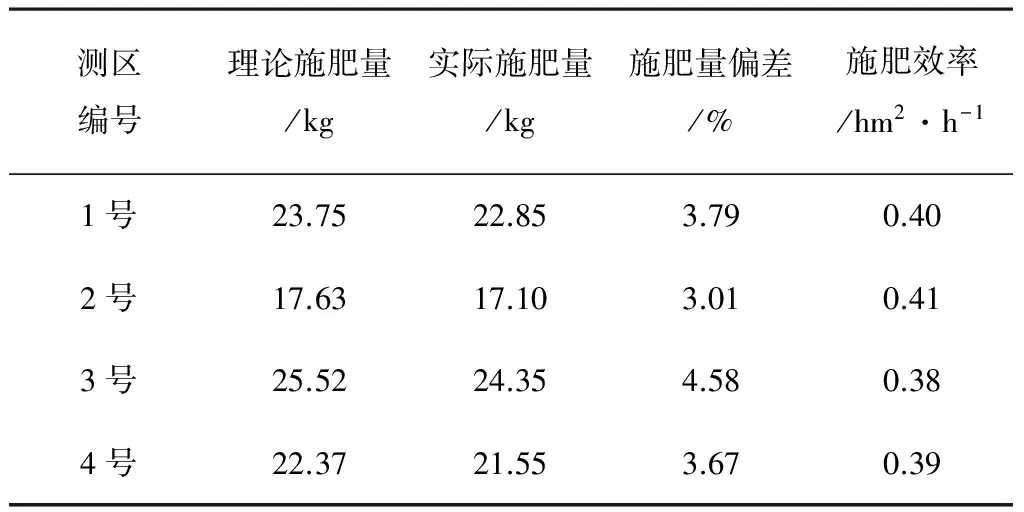
表3 一垄双行深施肥机田间施肥测试参数
4 结论
1)设计的一垄双行深施肥机配置了精准施肥控制系统,可一次性完成起垄和精准深施肥作业,系统稳定,作业过程中无断条现象,满足农业生产中的施肥精度要求。
2)一垄双行深施肥机的垄高、垄顶宽和垄基宽符合烟草农艺要求,旋耕深度至少25cm,可满足深施肥要求。
3)田间试验表明:该机具起垄效果好,合格率高,三项指标变异系数均符合烟草作业起垄要求。施肥量偏差最大为4.58%,小于烟草行业标准的8%,施肥效率最高达到0.41hm2/h。
参考文献:
[1]付乾坤,荐世春,吕爱民,等.玉米玉米灭茬起垄施肥播种机的设计与试验[J].农业工程学报,2016,32(4):9-16.
[2]远鹏,龙慧,刘志杰.我国施肥技术与施肥机械的研究现状及对策[J].农机化研究,2015,37(4):255-260.
[3]李慧,佟秋成,陈魁,等.分层侧深施肥播种机的研发[J].中国农机化,2013,35(5):105-108.
[4]许鑫,张浩,席磊,等.基于Web GIS的小麦精准施肥决策系统[J].农业工程学报,2011,27(2):94-98.
[5]古玉雪,苑进,刘成良,等.基于模糊系统的开度转速双变量施肥控制序列生成方法[J].农业工程学报,2011,27(11):134-139.
[6]何进,李洪文.1QL- 70型固定垄起垄机设计与试验[J].农业机械学报,2009,40(7):55-60.
[7]蒋春燕,耿端阳,孟鹏翔,等.基于电动驱动的玉米精量播种机智能化株距控制系统设计[J].农机化研究,2015,37(5):100-104.
[8]侯蕊,朱瑞祥.变量撒肥机设计参数研究及控制系统设计[J].农机化研究,2015,37(4):114-116.
[9]邵利敏,王秀,刘晓颖,等.基于PLC的变量施肥控制系统设计与试验[J].农业机械学报,2007,38(11):84-87.
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
农业工程学报(2022年1期)2022-03-25
装备维修技术(2021年42期)2021-03-15
农业开发与装备(2021年1期)2021-02-08
新丝路(下旬)(2020年4期)2020-04-23
湖北农业科学(2017年17期)2017-10-13
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
农家科技中旬版(2016年8期)2016-11-02
