
基于PLC的喷杆喷雾机变量喷雾自动控制系统设计
2018-04-12 00:52冯耀宁缪友谊
农机化研究 2018年4期
裴 亮,李 晔,冯耀宁,张 晓,陈 晓,缪友谊
(农业部南京农业机械化研究所,南京 210014)
0 引言
喷杆喷雾机作为大田作物高效喷洒农药的农具,广泛应用于棉花、玉米、大豆和小麦等作物生长的病虫害防治。近几年来,喷杆喷雾机特别是自走式喷杆喷雾机,由于其高效的田间性能、良好的田间作业质量得到了广大用户的欢迎。然而,目前的自走式喷杆喷雾机的发展仍处于起步阶段,自动化程度低、喷雾系统落后及喷洒不均导致的农药浪费和环境污染问题仍然很严重。
目前,喷杆喷雾机喷洒不均的主要原因主要有以下几点:①喷头的选择不正确;②喷头的喷雾量不一致;③喷头的安装角度不正确;④喷洒机具行驶速度不均。特别是行驶速度不均这一点,现有机具解决起来比较困难。因此,设计一套自动化和智能化程度较高、喷雾理念比较先进喷雾自动控制系统,以解决行驶速度不均导致的喷洒不均是十分必要的。
针对精准喷雾的要求,本文提出了一种变量喷雾的控制系统的设计方案:采用西门子S7-200 PLC及TP270触摸屏对整个系统进行数据处理及程序控制,将喷雾量与自走式喷杆喷雾机的行驶速度相关联,依据行驶速度的变化系统自动调整喷头喷雾量,从而使得无论在何种作业速度下单位施药面积的施药量均能保持一致。各主要部件位置关系如图1所示。

A.触摸屏 B.可编程控制器(PLC) C.液压电磁阀 D.电控节阀 E电控比例控制阀 F.流量传感器 G.主阀H.转速传感器 I.离心泵 J.过滤器 K.喷杆 L.压力传感器图1 喷杆喷雾机变量喷雾系统部件位置关系图
1 总体设计
变量喷雾的控制思想来自以下公式,即
式中M—每公顷的施药量(L/hm2);
K—整个喷雾系统喷头总流量(L/min);
A—喷杆喷幅(m);
V—自走式喷杆喷雾机的行驶速度(km/h)。
从上述公式可以看出:在喷杆喷幅确定的情况下,可以通过控制自走式喷杆喷雾机的行驶速度和整个喷杆系统的喷头总流量来达到控制施药量的目的。
该控制系统自动控制过程自上而下是这样的:在初始条件下,操作人员根据作物种类、病虫害状况、作业季节及施药种类计算每公顷的施药量,并在系统内部设置此值;操作人员测量自走式喷杆喷雾机喷幅,并在系统内部输入喷幅值。
在喷洒作业中,系统会根据自走式喷杆喷雾机的行驶速度、公式自主计算喷雾系统所需的总流量;整个系统管路中集成有电控比例阀,能够根据电信号的大小转换成阀口开度的大小和根据系统给定的流量数值转换成电压信号,再根据电压信号转换成阀口相应的开度,从而精确控制通向喷头的流量。
为了更精确地控制通向喷头的流量,系统在电控比例控制阀的出口安装有流量传感器,从而将系统的流量控制由开环控制转化为闭环控制,提高了控制的精准性和可靠性。
为了检测自走式喷杆喷雾机的行驶速度,在车轮紧固螺丝处安装有转速传感器,系统将转速传感器采集的角速度数据通过计算后转换为车轮的线速度。
由于本文中采用通过调节回水流量的方式来调节喷头流量和系统压力,因此系统所采用的容积泵必须有比较大的出水流量。据试验测算,要达到此控制
要求,容积泵的最大出水流量要达到整个系统喷头总流量的两倍以上。本文所采用的容积泵为离心泵,离心泵结构紧凑、流量范围宽、适用于轻度腐蚀性液体、控制方式多样、流量均匀、运转稳定且振动小。虽然工作压力比较低,大多数在0.5MPa以下,但正好符合喷杆喷雾机低工作压力高流量的要求。
系统还可动态显示并设定各种参数,如系统压力、流量、药液箱液位、行驶速度以及故障信息等。
对于大型的喷杆喷雾机的喷杆展开方式,人工展开折叠工作量大,系统为了提高自动化水平设计了液压缸作为喷杆展开折叠以及升降的执行机构,采用液压电磁阀来控制液压油的流向和通断,通过PLC的信号输出来控制液压电磁阀的通断及换向。
2 主要结构设计
2.1系统硬件选择
变量喷雾自动控制系统的电气部分分为3层:
1)第1层为集中控制层(上位机)。上位机选用西门子TP270,利用组态王软件开发出一套变量喷雾自动控制系统的控制程序,作为实时监控和发出指令的中枢,通过Profibus-DP总线传给下位机(PLC),并从下位机接收指令。
2)第2层为现场控制层(下位机)。考虑到现场有近16个数字量输入点、9个数字量输出点、3路模拟量输入及1路模拟量输出,下位机采用西门子S7-200CPU224作为控制核心,扩展一个数字量扩展模块EM223和一个模拟量控制模块EM235。控制硬件原理图如图2所示。
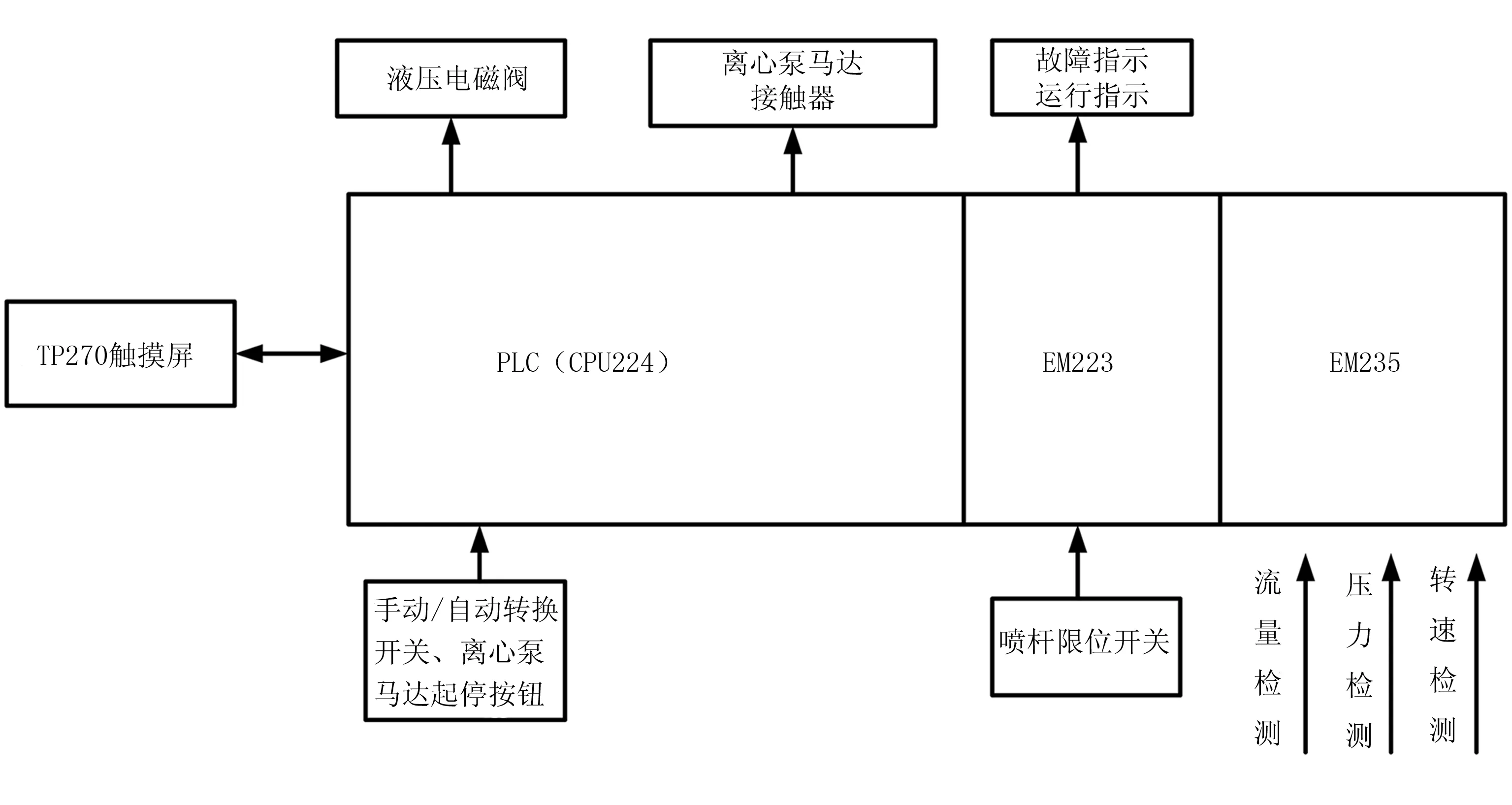
图2 控制硬件原理图
3)第3层为现场传感器、执行器和限位开关等。传感器主要由流量传感器、压力传感器、液位传感器、转速传感器和操作按钮等组成;执行器主要由液压马达、离心泵、各路液压电磁阀及控制各路液体的电动阀等组成;限位开关主要用来输入各段喷杆的就位信号,如升降是否到位及喷杆展开是否到位等。
2.2I/O点分配
变量喷雾自动控制系统I/O点分配如表1所示。

表1 PLC的I/O分配表
2.3系统软件的设计
2.3.1软件设计思想
变量喷雾自动控制系统有3种工作模式,即手动控制、半自动控制和自动控制模式。手动控制模式直接控制各个电动阀门动作和离心泵的起停。该模式下,操作人员可以手动调节每一个阀门的开度,从而调节系统的工作压力、流量,以满足不同的工作环境需要。半自动控制模式按照控制要求单步操作,操作人员可以在控制程序下分别检查各子程序的工作情况,如喷杆升降、喷杆展开折叠是否到位,以及喷头流量与设计是否一致等。自动控制模式用于平时的正常生产,按照喷雾作业的要求在一定的时序下顺序进行。该模式下,操作人员除了正常操作机器行驶外,其余部分都由程序控制进行。如果自动控制出现问题,可以转到半自动模式进行。
2.3.2系统软件设计
变量喷雾自动控制系统主程序流程如图3所示。
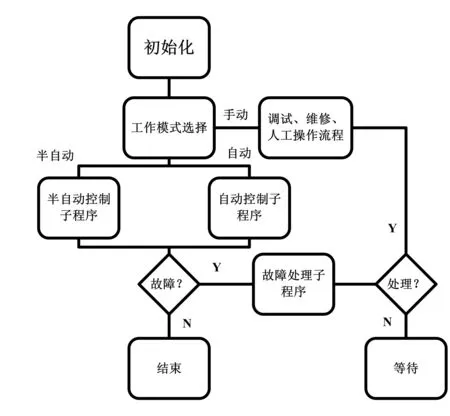
图3 主程序流程图
变量喷雾自动控制的子程序包括自动控制子程序、半自动控制子程序、手动控制子程序、故障处理子程序、喷杆展开折叠子程序、喷杆升降子程序及流量控制子程序等。由于篇幅限制,本文只对自动控制子程序作简要说明,其流程如图4所示。

图4 自动控制子程序流程图
3 试验验证
3.1试验条件
性能试验在位于临沂市河东区的某植保机械生
产企业质检车间进行。该车间拥有1台机具行走试验台,该试验台可将车轮置于辊子上,通过车轮带动辊子转动,模拟车辆在平地上行走。试验台上有速度显示仪,用于显示机具的行驶速度。
3.2试验方法
系统选定施药量为195L/hm2,选用ST110-015型号喷头,分别在机具速度为5、6、7km/h,喷雾压力为0.3MPa下,测量喷头实际喷雾量,喷头实际喷雾量与设定喷雾量的误差在5%以内为设计有效。本次试验的机具喷雾为11m,每次测试时间3min,喷头个数为22个。
3.3试验结果分析
由表2、表3中可以看出:随着机具行驶速度的增加,无论是单个喷头的喷量还是整个系统的喷量,都有所增加。这是因为在公式中在每公顷施药量不变的情况下,系统单位时间的施药量与机具的行驶速度成正比,根据公式计算的每公顷实际施药量大致相同。由于轮胎与试验台棍子之间有打滑现象的发生,试验台显示的速度与机具的实际速度并不完全一致,导致施药量存在一定的误差,然而误差基本保持在5%的范围内,这也验证了整个系统基本达到了预期的效果。

表2 变量喷雾自动控制系统试验结果

表3 变量喷雾自动控制系统试验结果(续)
4 结论
以S7-200 PLC为核心的变量喷雾自动控制系统,实现了对流量、压力的自动控制,实现了以总施药量为控制目标的喷雾系统变量控制,实现了对药箱液位、工作流量、速度的实时监控,
实现了对喷杆展开、折叠及升降的自动操作,减轻了劳动强度,提高了工作精度和喷洒质量,提高了劳动生产率。
参考文献:
[1]廖常初.PLC编程及应用[M].北京:机械工业出版社,2002.
[2]周巍,牛志刚,李元宗.基于PLC的防冻液喷洒控制系统设计[J].煤矿机械,2009,30(1):111-114.
[3]于治福,李旭鸣,商德勇,等.基于PLC的煤矿主排水泵自动控制系统设计[J].煤矿机械,2010,31(1):24-26.
ID:1003-188X(2018)04-0129-EA
猜你喜欢
农业开发与装备(2022年7期)2023-01-05
农业装备与车辆工程(2022年5期)2022-10-31
中国农机化学报(2022年8期)2022-08-12
农业机械学报(2022年2期)2022-03-14
落叶果树(2020年5期)2020-10-22
农机使用与维修(2018年3期)2018-03-23
农业知识(2018年45期)2018-01-17
江苏农业科学(2016年1期)2017-05-17
中国科技纵横(2015年2期)2015-11-05
科学中国人(2014年16期)2014-11-20
