
2BQ-28型三七精密播种机布局优化研究
2018-04-12 00:52杨文彩杜一帆宋志鹏
农机化研究 2018年4期
林 利,杨文彩,杜一帆,宋志鹏
(云南农业大学 机电工程学院,昆明 650051)
1 研究背景
三七是云南省重要的中药材作物,具有极高的药用、医疗保健及经济价值[1]。以云南农业大学朱有勇院士为首的克服三七连作障碍研究团队探索的三七槽式育苗模式,是云南省政府主导推广的三七育苗模式,经过多年实践也证明了其科学性和实用性[2]。课题组针对该模式研发出配套的2BQ-28型三七精密播种机,在生产实践中具有良好的效果。
三七精密播种问题涉及到农艺、播种机械、操作人员及大棚育苗环境等多因素,是一个人-机-环境系统工程问题。为了充分认识三七槽式育苗模式中各个因素互相作用的关系,课题组前期运用模糊综合评价法,对2BQ-28型三七精密播种机进行了人-机-环境系统工程安全性评价,总体安全性评价一般。其中,人、环境的因素评价良好,机的评价因素一般。在近两年的生产实践中,人环适应已经得到了充分考虑[3],但2BQ-28型三七精密播种机主要还存在人-机不够配合及机-环不够协调等问题。具体体现在:①部件空间布局不合理;②传动关系不合理;③人机操作安全性有待提高。
人-机-环境系统工程是运用系统科学理论和系统工程方法,正确处理人、机、环境三大要素的关系,深入研究人-机-环境系统最优组合的一门科学[4]。本文拟运用人-机-环境系统工程及机电一体化设计等相关知识,对上述问题进行优化。
2 基于人-机-环境系统工程的布局优化
2.1播种机存在的问题分析
2.1.1部件空间布局不合理
部件空间布局不合理,主要体现在:①电机的安装位置使操作人员清理种子困难,且操作人员使用升降杆调节万向轮高度时手臂和肘容易磕碰种子箱。②机器的质量分布不对称。机器行走过程中向一端有微量倾斜,加上育苗槽建造规范性、基质高低均匀性不理想,机器歪斜超过限位轮保护范围,造成机器卡死、刮坏育苗槽等现象,具体如图1所示。Q1标注位置:万向轮升降杆与种子箱之间的距离过近,操作人员手动旋转万向轮升降杆时,种子箱在人体的手、肘旋转运动半径以内,极易发生磕碰,影响操作人员手部安全,降低工作效率。Q2标注位置:电机与种子箱最窄处不足50mm,空压机与种子最宽处不足90mm;参考国标GB/T 18717.2-2002中双前臂至肘向前、下进入开口的方法,开口最小应满足手臂厚度50mm、基本裕量20mm、工作服20mm,共计90mm,可知Q2处的厚度基本不能满足这一条件[5]。Q3标注位置:控制柜、电机等较重部件集中在播种机左侧,机器行进时向左侧倾斜并挤压此侧限位轮,当机器偏差过大超过限位轮工作范围时,限位轮卡死,出现非正常停机现象。③排种器护种板开口位置不合理:播种机在工作时,可能存在窝眼滚筒重复充种、窝眼内包衣剂粉尘过多的现象,如图2~图3所示。为了清除窝眼滚筒内卡死或多余的种子,以及包衣剂粉尘、灰尘等杂质,本机设计了排种器护种板开口,操作人员可以使用空压机气枪通过护种板开口进行清种。

1.万向轮升降杆 2.窝眼滚筒轴线保护机壳 3.机架4.控制柜 5.电机 6.种子箱 7.种子箱隔板 8.空压机

图2 操作人员视角示意图
图2中,由于此开口过短,且开口位置过低,含有多余种子的窝眼滚动到排种器护种板开口时,操作人员无论是站姿还是蹲姿都无法第一时间看到;当操作人员发现窝眼内含有种子时,操作时间已经不足。
2.1.2传动关系不合理
本机的传动关系是由电机通过所在轴齿轮链传动带动主动轮轴转动,再由主动轮所在轴的齿轮通过链传动带动窝眼滚筒轴转动。机器非正常停机时主动轮停止转动,窝眼滚筒在电机的作用下持续转动,导致严重的停机重播现象。改进前传动方式如图4所示。

图3 改进前排种器护种板开口位置示意图

图4 改进前传动方式简图
2.1.3人机操作安全性有待提高
正确的进行人-机-环境系统工程安全性评价对提高人机操作安全性很重要。根据Delphi法[6],项目组选取如表1所示的评价因素及评价指标。选择备择集{好,良好,一般,差},按照9标度打分法,设计了一、二级权重调查表,以参与2BQ-28型三七精密播种机播种生产环节的师生为调查对象进行数据采集。

表1 评价指标的选取
本文运用了模糊综合评价法[7],对收集的调查结果进行分析评价,将数据带入,得出权重集A=(0.31 0.4 0.29),单因素评价矩阵R为
最终得出人-机-环境系统工程的模糊综合评价B=A×R=(0.18 0.4 0.37 0.09)。
根据以上数据分析,2BQ-28型三七精密播种机的人-机-环境系统工程安全性评价良好。
2.1.4用电安全性差
机器的用电安全性存在以下两个问题:①控制柜内线路混杂,存在安全隐患且浪费大量空间;②机器接电方法不规范,随着机器行进,电线在育苗槽肩及基质表面拖动易磨损漏电,且在一定程度上破坏了三七种苗的发育环境。
改进前控制柜内部电路安装位置示意图如图5所示。

图5 改进前控制柜内部电路安装位置示意图
图5中,电路开关、端子排、控制显示器等部随意摆放,线路杂乱且没有固定方式。改进前机器接电线路示意图如图6所示。图6中,三七育苗大棚纵深方向每隔30~40m、水平方向每隔4~5个育苗槽设置有一个电线插座,负责播种机的电力供应。2BQ-28型三七精密播种机的接线方法为:由电线插座引线经槽肩、基质表面,在万向轮升降杆绕匝(播种机工作时万向轮向上收起拧紧)固定后通过电线插排接入控制柜。这种接线方法存在以下问题:①不符合电力系统设计要求;②万向轮升降杆不具有绕线器的功能,容易发生电线掉落被机器碾压的情况;③机器行进时,电线在育苗槽槽肩、基质表面拖动,电线表面的绝缘层受到严重的磨损,形成用电安全隐患;④三七种子播种后必须进行覆土处理,保护种子不受自然光、空气流动等影响损失水分;但是覆土层的厚度很薄,三七种苗种植的农艺标准为1cm,机器行进时电线在基质表面拖动,破坏了覆土层,严重影响了三七种子的发育。
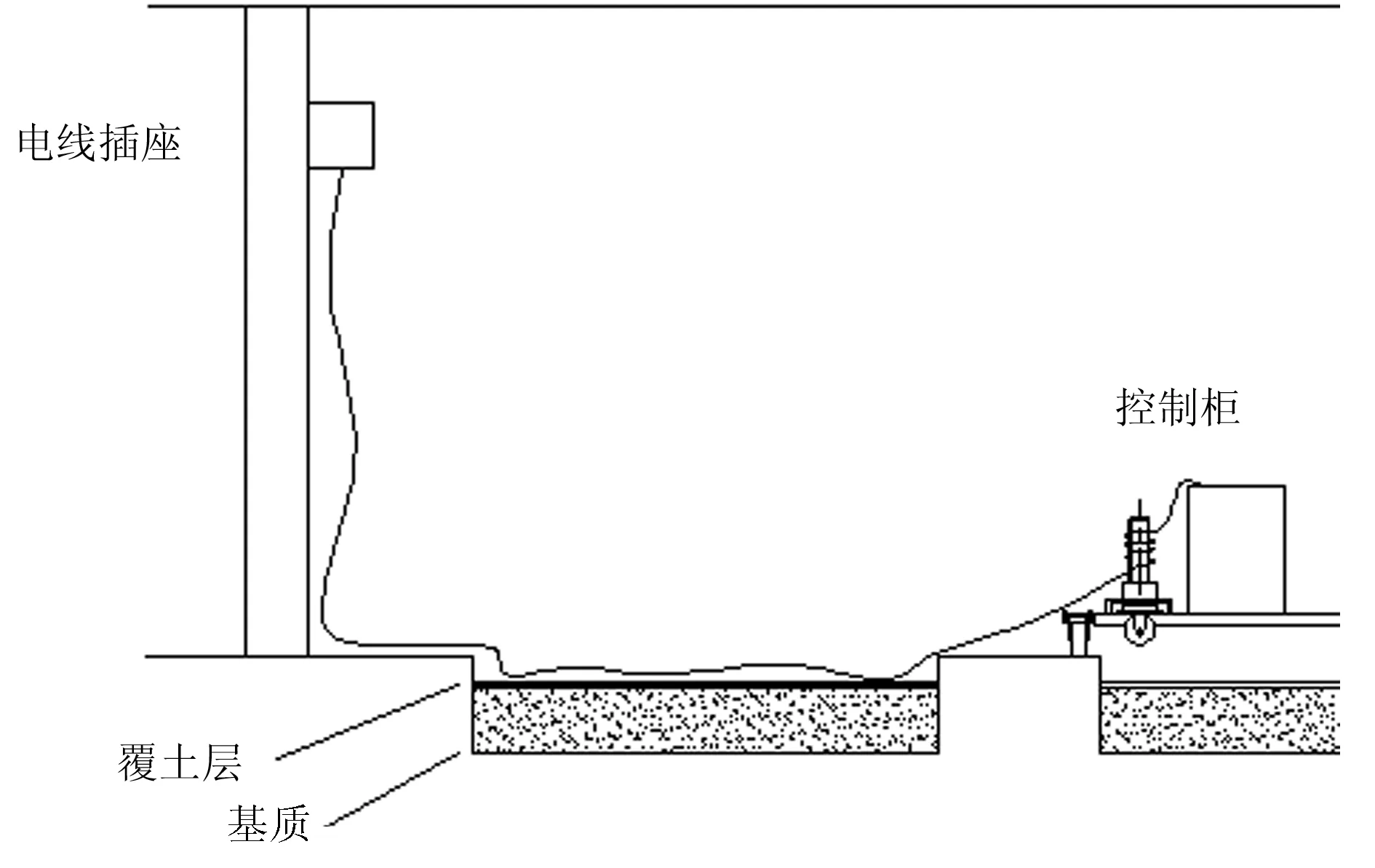
图6 改进前机器接电线路示意图
根据2.1.1~2.1.4节的分析可以得出结论:①需要对部件布局进行调整优化,使之符合人机工程学;②传动关系需要重新设计;③机器安全性有待提高,尤其是用电安全需要改进。
2.2优化原则
2BQ-28型三七精密播种机布局优化的原则如下:①整机尺寸美观大方,比例与尺度适合,适用于槽式育苗大棚。②控制部件集中,人机交互设备简洁明了:操作装置易于操作人员用力,符合人体工效学原则。③各部件布局合理,给操作人员操作机器预留空间;简化整合各部件的线路;机器质量分布均匀。④安全性有保障,避免出现有可能伤害到操作人员的情况。
2.3优化措施
2.3.1播种机整机布局优化
改进后,电机与种子箱之间的距离增加45cm;控制柜调整到与空压机同一水平方向,以平衡质量;播种机整机尺寸增加50mm;机器后方(以行进方向为正方向)万向轮升降杆、机架与种子箱之间的距离增加50mm,如图7所示。

1.控制柜 2.万向轮升降杆 3.窝眼滚筒轴线保护机壳4.机架 5.电机 6.种子箱 7.种子箱隔板 8.空压机
2.3.2传动关系的改进
为解决2BQ-28型三七精密播种机卡死时出现的停机重播现象,现设计为电机通过所在轴齿轮链传动带动主动轮轴转动,机器行进带动从动轮轴转动,再由从动轮所在轴齿轮链传动带动窝眼滚筒轴转动;一旦机器非正常停机时,机器停止行进从动轮停止转动,窝眼滚筒也停止转动。改进后传动方式简图如图8所示。

图8 改进后传动方式简图
2.3.3排种器护种板开口优化
如图2所示,以GB10000-1988《中国成年人人体尺寸》为参考依据,取人体站姿眼高1 600mm[8];轴心离育苗槽肩高度460mm,观察护种板人员与窝眼滚筒轴心距离范围取400~1 000mm;俯首舒适角取15°;人体主要视角以人眼水平视线为基准,向下偏离70°~90°[9]。种子箱的构造及尺寸经过实体测量及理论对比,得出以下数据:种子箱上部宽430mm,种子箱机器后侧部分高345mm,种子箱机器机器前侧垂直部分高245mm,倾斜部分高100mm,宽140mm,窝眼滚筒直径230mm,护种板厚20mm,护种板开口最低端据窝眼滚筒轴线水平距离55mm,护种板开口最顶端距窝眼滚筒轴心垂直距离75mm。
改进后排种器护种板开口位置示意图如图9所示。改进后护种板开口最低端距窝眼滚筒轴线水平距离为65mm,护种板开口最顶端距窝眼滚筒轴心垂直距离25mm。
2.3.4控制柜的改进
控制柜外部采取双LED灯显示机器工作状态,利用机械造型原理中点具有高度集中感觉,大面与点之间形成强烈的对比作用,极易引导视线、突出焦点[10];内部线路布局以电源线为设计基准[11],在控制柜中间增加绝缘线槽作为电路通道,电路开关、端子排、控制显示器在绝缘线槽上方集中放置,如图10所示。

图9 改进后排种器护种板开口位置示意图

图10 改进后控制柜内部电路安装位置示意图
2.3.5机器接电方案的改进
为保障用电安全,做如下改进:在育苗棚内顶部、育苗槽肩正上方设置托架,控制柜外部增加一个绕线柱;机器接电线路从电线插座引出,经托架后在绕线柱上绕匝、固定,最终接入控制柜,如图11所示。
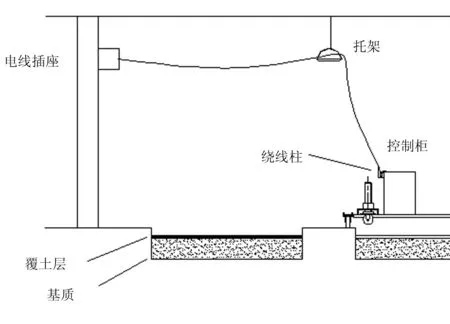
图11 机器接电线路的机-环协调优化
托架只需在电线插座的水平位置上放置,每一个育苗槽间隔只放置一个,以规格16槽×120m槽长的三七育苗大棚为列,平均每个大棚只需放置36~48个托架,改进成本低,实用性强。
3 结论
科学、全面地认识三七育苗系统中的各个要素,系统优化三七精密播种机,对三七育苗环节起着重要作用。本文从人-机-环境系统工程的角度出发,综合了三七育苗农艺要求、机械设计、机电一体化及人体工效学等各方面的知识,对2BQ-28型三七精密播种机整机及部件空间分布、传动关系、排种器护种板开口位置、控制柜布局、机器接电方案进行了优化,改善了播种机的人-机匹配和机-环协调问题,为三七播种质量提供了重要保障。
参考文献:
[1]崔秀明,黄璐琦,郭兰萍,等.中国三七产业现状发展对策[J].中国中药杂志,2014,39(4):553-557.
[2]杨文彩,朱有勇,张汝坤,等.基于可持续发展的三七产业农机农艺融合工程技术体系研究[J].湖北农业科学, 2014,53(1):122-129.
[3]杨文彩,朱有勇,杜 迁,等.基于农机农艺融合的三七机械化精密播种系统研究[J].广东农业科学,2014(2) :175-180.
[4]王保国,王 伟,黄伟光,等.钱学森系统科学思想在人机环境系统工程中的应用[J].华北科技学院学报,2014,11(8):1-18.
[5]国家质量监督检验检疫总局.GB/T 18717.2-2002用于机械安全的人类工效学设计:第二部分:人体局部进入机械的开口尺寸确定原则[S].北京:中国标准出版社,2002.
[6]谭玉叶,宋卫东,李铁一,等.采矿方法优选多目标决策一致性组合权重研究及应用[J].工程科学学报,2014(8):1115-1122.
[7]屈力进.基于模糊综合评价法的煤矿机械制造工艺方案选择[J]. 煤矿机械,2012,33(12):118-119.
[8]国家技术监督局.GB/T 10000-1988中国成年人人体尺寸[S].北京:中国标准出版社,1989.
[9]马广韬,代琦.基于人机工程学的汽车式起重机操纵室视野研究[J].沈阳建筑大学学报:自然科学版,2011,27(2):169-173.
[10]《机械设计手册》编委会.机械设计手册单行本:造型设计与人机工程[M].北京:机械工业出版社,2007.
[11]《机械设计手册》编委会.机械设计手册单行本:机电一体化系统设计[M].北京:机械工业出版社,2007.
猜你喜欢
中国交通信息化(2022年6期)2022-08-30
交通科技与管理(2022年8期)2022-05-07
机械工程师(2022年3期)2022-03-24
农业技术与装备(2021年3期)2021-12-01
今日农业(2020年22期)2020-12-14
农民致富之友(2019年22期)2019-08-16
农民致富之友(2019年16期)2019-07-01
中国特种设备安全(2019年4期)2019-05-20
现代职业教育·中职中专(2018年7期)2018-05-14
军事运筹与系统工程(2017年1期)2017-07-31
