
单机械手夹持状态下钻杆运移平稳性分析
2022-05-30 11:15李昊轩王清岩金赠伍李苓豪郭乃铭
钻探工程 2022年3期
李昊轩,王清岩*,2,金赠伍,李苓豪,郭乃铭
(1.吉林大学建设工程学院,吉林 长春 130026;2.复杂条件钻采技术自然资源部重点实验室(吉林大学),吉林 长春 130026)
0 引言
如今自动排管机等自动化装备已经广泛应用于钻井工程领域。国外石油钻探自动化技术已经相当成熟,已经实现二层台钻杆排放的自动化操作。近些年来,国内针对石油钻井自动化技术的研究突飞猛进,已经初步实现了管具运移装置的自动化[1-3]。
在地质岩心钻探领域,国外已经完成岩心钻机的自动化和智能化升级,极大地提高了取心质量和工作效率。而我国针对钻探装备自动化的研制和应用才刚刚起步,所用设备自动化水平低,无法满足发展需要。
钻杆夹持机械手作为自动排管机的重要组成部分,排管机工作时,通过其夹持并提升钻具,再将钻具于井口和指梁间进行往返运输。其应具有结构紧凑、质量轻等特点;同时确保钻杆夹持的可靠性,尤其是在夹持钻杆并运移的过程中应具有足够的卡紧力。现有石油钻井常用的机械手结构复杂、质量大,且夹持钻杆后,钻杆自由度为零。当钻杆被运移至井口后,机械手松开,顶驱带动钻杆进行对接,此时钻杆下端处于悬空状态,钻杆旋转时易发生偏轴[4-10]。
地质岩心钻探相对于石油钻探所用钻杆直径和钻塔尺寸都相对偏小,把石油钻井机械手比例缩小无法保证其功能和强度满足条件[11-13]。因此应进一步针对地质岩心钻探领域对管具运移装置进行创新,设计出适用于地质岩心钻探的新型机械手。应提高机械手自动化程度;减小机械手尺寸和质量,以适应地质钻探施工环境;提高其停泵保压性能,以满足钻杆运移动作;实现夹紧钻杆时保留其旋转自由度,提高钻杆接卸时的稳定性,以更好地满足现代钻探作业的需求。
1 主要研究内容
本文主要设计了一种新型机械手,并研究其夹紧运移钻杆时的平稳性。该机械手结构紧凑、质量轻,通过滚轮结构夹持钻杆,保留了钻杆的旋转自由度。由于存在泄漏,通过蓄能器维持液压回路压力,增强了回路停泵保压性能。
设计的机械手属于自动排管机中的夹持机构,配合翻转和平移机构可实现起下钻时的夹持及运移功能。机械手整体动作分为夹紧钻杆动作、翻转钻杆动作和平移钻杆动作3 部分。为研究翻转和平移期间机械手的夹紧效果,联合机械手多体动力学模型和配套的液压回路模型进行仿真。通过仿真得到针对不同直径钻杆,钻杆夹紧力及钻杆重心位移随液压系统压力变化的曲线。最后对仿真结果进行总结分析,确定液压系统的许用压力范围,并验证了单机械手夹持状态下钻杆运移平稳性满足要求。
2 机械手传动系统设计
2.1 工作原理
机械手的结构示意见图1。其工作原理为:液压缸活塞杆向外伸出,活塞杆通过传动杆驱动楔形推板移动,进而通过楔形推板两侧的曲面与后滚轮的接触,带动机械手夹板绕长销轴旋转,最终通过前、中滚轮夹紧钻杆。曲面斜楔机构使机械手夹持钻杆的过程更加平稳。

图1 机械手结构示意Fig.1 Structure diagram of the manipulator
该机构活动件由6 个,包括楔形推板、两个机械手夹板、两个中滚轮和一个钻杆,有5 个低副和6 个高副,该机构自由度为F=3×6-2×5-6=2 个,可以对楔形推板施加平移驱动、对钻杆施加旋转驱动。
2.2 机械手传动系统建模
该机械手由箱体、液压缸、传动杆、楔形推板、机械手夹板、滚轮、长销轴等部件组成,其结构如图2、图3 所示。通过4 组滚轮夹持钻杆,可以更好地贴合不同直径的钻杆,既能稳定夹持钻杆,又提高了工作效率保留了钻杆旋转自由度。当钻杆运移至井口后,在机械手机械夹持悬空的状态下进行对接,提高了工作效率和工作稳定性。机械手夹持管径范围为Ø73~127 mm,最大夹持悬重为110000 N,滚轮及钻杆间的摩擦系数为0.15,夹持钻杆质量范围为250~1050 kg[14]。

图2 机械手结构Fig.2 Structure of the manipulator

图3 机械手内部结构Fig.3 Internal structure of the manipulator
机械手中的活塞杆配合防松螺母和垫圈固定传动杆,楔形推板通过螺栓连接固定在传动杆下端的卡槽中;楔形推板两侧具有凸型结构,该结构与安装于箱体两侧的尼龙导轨相配合,当楔形推板移动时对其进行导向;前滚轮和后滚轮通过销轴分别安装在机械手夹板的前后两端,中滚轮通过销轴安装在可调座板上,滚轮上的滚轮套通过限位套与其他部件隔开,使其可以绕销轴进行旋转,进而通过滚轮夹紧钻杆时,保留了钻杆的旋转自由度。一根立根由3 根钻杆祖成,长18 m。当立根运移至井口后,动力头抓取立根上端,立根下端处于自由状态,动力头带动立根旋转时易发生偏轴现象,导致立根无法拧卸甚至接头螺纹破损。该新型机械手保留了钻杆旋转自由度,可以在拧卸钻杆时继续夹持钻杆,保证拧卸钻杆时轴线不发生偏移[15-16]。
后滚轮可与楔形推板两侧的曲面斜楔结构相配合,对机械手的加紧起到增压作用。长销轴通过销轴分别安装在箱体上,机械手夹板可绕长销轴旋转。回程板通过中间的方形槽套装在传动杆上,并通过螺栓连接固定在传动杆中部,其导槽用于机械手复位。
3 机械手液压控制系统设计
3.1 液压控制回路设计
根据机械手驱动液压缸的动作、压力调节原理和系统保压的功能,其液压回路如图4 所示。

图4 机械手液压系统控制原理Fig.4 Control principle of the hydraulic system of the manipulator
其工作原理为:进行夹紧钻杆动作时,打开发动机,液压泵开始供油,分段线性信号输入负值,反馈信号值为1,此时通过信号控制夹紧机构回路中的比例方向阀处于右位,此时液压系统开始工作。一部分液压油进入蓄能器,一部分液压油进入液压缸的无杆腔,驱动活塞杆伸出,从而夹紧钻杆。夹紧钻杆后回路中的压力继续升高,当到达液压回路额定压力值时,反馈信号值变为0,通过该反馈信号控制方向阀回到中位,此时负载敏感变量泵停止工作,回路通过蓄能器进行保压。
为减少能耗,液压回路中采用负载敏感变量泵,可以使回路的压力和流量相匹配。刚开始工作时,液压系统负载很小,负载敏感阀处于右位,负载敏感泵液压缸中的活塞杆在弹簧力的作用下处于最右端,负载敏感变量泵此时输出最大流量。机械手夹紧钻杆后,方向控制阀关闭,方向控制阀前端液压回路压力继续增加,当其大于阀后液压回路压力与弹簧力的和时,控制负载敏感阀处于左位,主油路联通负载敏感泵液压缸,液压缸活塞杆在液压力的作用下克服弹簧向左移动,负载敏感变量泵输出流量变小,直至接近0。
通过安装蓄能器,既可以吸收回路中的冲击压力,也可以减小泄漏对回路压力造成的影响,提高液压系统的停泵保压效果。
在液压回路中设置的双向平衡阀具有锁紧作用,避免在运移钻杆的过程中,因为碰撞或发生压力波动造成机械手失效,提高了机械手的工作稳定性[17-20]。
3.2 液压控制回路参数设置
回路中的分段控制信号为:0~-1,1 s;-1~-1,8 s;-1~0,1 s;0~0,120 s。一方面采用分段信号可以减小电磁比例方向阀开启和关闭时产生的液压冲击,提高了机械手工作的稳定性;另一方面,10 s 后控制信号变为0,当液压回路压力低于额定工作压力时反馈信号值重新变为1,但电磁比例方向阀依旧处于中位,液压泵依旧停止输出。
将液压系统额定工作压力设置为13 MPa;为保证机械手可以完成运移钻杆的整个过程,单次充液保压时间应大于120 s;根据文献查阅[21-25],一般液压回路中泄漏量较小,为验证蓄能器的保压效果,泄漏流量拟定值适当偏大为0.04 L/min;一般蓄能器有0.4、0.63 和1 L 等型号,在保证液压系统响应速度的基础上,为达到最好的保压效果,蓄能器容积为1 L。
4 机械手联合仿真分析
机械手整体动作:开始工作时,液压缸驱动机械手在井架处夹持钻杆。待稳定夹持后,机械手翻转90°并进行平移,将钻杆运移至井口。控制信号参数如表1 所示。

表1 控制信号参数Table 1 Control signal parameters
为分析机械手运移钻杆时的平稳性,以直径为127 mm 的钻杆为例,通过联合仿真分析机械手前、中滚轮与钻杆间的受力(即钻杆夹紧力)变化情况及钻杆重心的位移情况。
4.1 机械手运移过程分析
首先打开发动机,机械手开始夹紧钻杆,当机械手夹紧钻杆后,机械手开始翻转动作,带动钻杆旋转90°,机械手翻转角速度为0.1 rad/s,整个翻转动作从第15 s 开始,整个动作时间为15 s。机械手翻转时钻杆转速如图5 所示。

图5 钻杆转速Fig.5 Angular velocity of the drill pipe
机械手完成翻转动作后进行平移动作,机械手夹持钻杆将其运移至井口处,平移动作过程中机械手的速度为0.01 m/s。整个平移动作从第60 s 开始,到第110 s 结束,整个动作时间为50 s,钻杆平移0.5 m。钻杆的水平位移如图6 所示[26]。
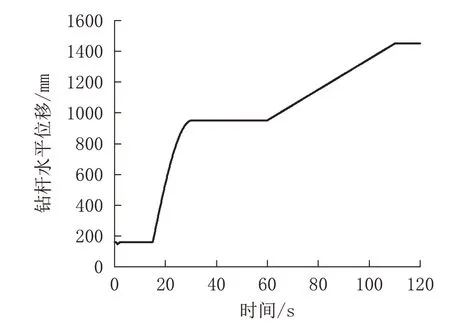
图6 钻杆水平位移曲线Fig.6 Drill pipe horizontal displacement curve
机械手最大长度为600 mm,宽度最大为350 mm,翻转角度为90°,水平位移为0.5 m,所占工作空间宽≯620 mm,长≯1500 mm。
4.2 钻杆受力情况分析
机械手夹持钻杆的平稳性首先体现在钻杆夹紧力上。图7~10 为中滚轮及前滚轮与钻杆间的接触力变化曲线。中滚轮1 与钻杆间接触力x轴分力最终为4192 N,y轴分力最终为10244 N;中滚轮2 与钻杆间接触力x轴分力最终为2297 N,y轴分力最终为9740 N;前滚轮1 与钻杆间接触力x轴分力最终为7329 N,y轴分力最终为12602 N;前滚轮2 与钻杆间接触力x轴分力最终为39223 N,y轴分力最终为7378 N;可知中滚轮1 与钻杆间的径向力为11069 N,中滚轮2 与钻杆间的径向力为10007 N,前滚轮1 与钻杆间的径向力为14578 N,前滚轮2 与钻杆间的径向力为39911 N。

图7 中滚轮1 与钻杆间的接触力Fig.7 Contact force curve of the middle rollers and the drill pipe

图8 中滚轮2 与钻杆间的接触力Fig.8 Contact force curve of the middle rollers and the drill pipe
改变钻杆的直径及重复上述仿真,由于机械手夹持范围为Ø73~127 mm,测试的是直径为127、108、89 和73 mm 的4 种钻杆,回路压力以13 MPa 为基点,1 MPa 为间隔进行测试,记录钻杆与滚轮间最大接触力变化情况,表2 为不同直径钻杆在不同回路压力下接触力变化情况。针对Ø127 mm 钻杆,液压回路压力>13 MPa 时,机械手夹紧力过大,钻杆发生破坏,仿真中止;当液压回路压力<7 MPa 时,机械手夹紧力过小,钻杆脱离机械手。同理,针对Ø 108 mm 钻杆,液压回路压力最大为13 MPa,最小为7 MPa;针对Ø89 mm 钻杆,液压回路压力最大为8 MPa,最小为5 MPa;针对Ø73 mm 钻杆,液压回路压力最大为5 MPa,最小为3 MPa。

表2 不同直径钻杆在不同回路压力下接触力变化情况Table 2 Changes in contact force of drill pipes of different diameters at different circuit pressures

图9 前滚轮1 与钻杆间的接触力Fig.9 Contact force curve of the front rollers and the drill pipe

图10 前滚轮2 与钻杆间的接触力Fig.10 Contact force curve of the front rollers and the drill pipe
为避免运移钻杆时发生碰撞导致接触力过大破坏钻杆,液压回路许用压力最大值应低于额定压力最大值,可以得到结论:当钻杆直径为127 mm 时,液压回路许用压力范围为7~12 MPa;当钻杆直径为108 mm 时,液压回路许用压力范围为7~12 MPa;当钻杆直径为89 mm 时,液压回路许用压力范围为5~7.5 MPa;当钻杆直径为73 mm 时,液压回路许用压力范围为3~4.5 MPa。
综上所述,在液压回路许用压力范围内,当机械手开始和结束翻转及平移动作时,机械手会有一定的载荷波动,但可以保证仍有足够的压力夹紧钻杆。
4.3 钻杆重心位移分析
钻杆重心下降位移直观反映了机械手的夹持效果。改变钻杆的直径,且针对不同采用相应的最大液压回路许用压力,夹持直径为127 mm 的钻杆时,液压回路压力设置为13 MPa;夹持直径为108 mm的钻杆时,液压回路压力设置为12 MPa;夹持直径为89 mm 的钻杆时,液压回路压力设置为8 MPa;夹持直径为73 mm 的钻杆时,液压回路压力设置为5 MPa。图11 为夹持直径为127、108、89 和73 mm 的钻杆时,钻杆重心的位移曲线。
由图11 可以看出机械手夹持大直径钻杆在开始和结束翻转动作时,钻杆会有明显的下滑情况。同时可知钻杆重心的初始位置为-60 mm(z轴正向为重力方向),机械手从夹持钻杆到最终将钻杆运移到井口后,直径为127 mm 的钻杆重心最终位置为-23.7 mm,直径为108 mm 的钻杆重心最终位置为-21.5,直径为89 mm 的钻杆重心最终位置为-31.7 mm,直径为73 mm 的钻杆重心最终位置为-40.8 mm。钻杆重心分别下滑3.63、3.85、2.82、1.92 cm。一般情况下,钻杆长度按3 m 一根计算,深井岩心钻探都是接立根钻进的,按一个立根18 m 长,钻杆重心下滑的距离远远小于立根的长度,可以忽略不计。综上所述,机械手在运移钻杆的过程中夹持钻杆的平稳性满足要求,且夹持小直径钻杆时效果更好。

图11 钻杆重心位移曲线Fig.11 Gravity displacement curve of drill pipe
5 结论
(1)设计了一种新型的机械手及对应的液压控制回路,保留了钻杆的旋转自由度,实现了排管机构及钻具旋转机构的联合作业,提高了施工效率和施工安全性。
(2)进行了单机械手多体动力学模型和液压回路的联合仿真分析,确定了在液压回路许用工作压力范围内,机械手可以稳定夹持的功能及运移钻杆时的稳定性满足要求。
猜你喜欢
World Journal of Hepatology(2022年10期)2022-11-29
化工管理(2022年27期)2022-11-15
东北石油大学学报(2022年4期)2022-10-21
农业工程学报(2022年1期)2022-03-25
西南石油大学学报(自然科学版)(2021年3期)2021-07-16
新教育论坛(2019年27期)2019-09-10
冰雪运动(2019年2期)2019-09-02
奥秘(2019年1期)2019-03-28
商品与质量(2018年35期)2018-04-25
阅读(中年级)(2016年11期)2017-01-23
