基于多通道输入和1DCNN-LSTM的道岔转辙机故障诊断
2023-12-01 11:13付雅婷温世明伍迎节
铁道学报 2023年11期
付雅婷,温世明,杨 辉,伍迎节
(1.华东交通大学 电气与自动化工程学院,江西 南昌 330013;2.华东交通大学 江西省先进控制与优化重点实验室,江西 南昌 330013;3.华东交通大学 轨道交通基础设施性能监测与保障国家重点实验室,江西 南昌 330013;4.中国铁路上海局集团有限公司 南京电务段,江苏 南京 210011)
道岔转辙机作为铁路基础设施被应用于引导列车到达预定的路线,从而确保每列列车的平稳运行[1]。然而,运输繁忙、客货运输密度大等工作环境常使道岔转辙机的动作杆、表示杆、齿轮等关键部件发生故障,影响列车的安全可靠运行。现有故障识别方式主要是利用集中监测系统实时监测转辙机动作时的工作电流和工作功率,通过与正常动作时的参考数据进行对比来处理道岔隐患[2]。这种方式具有一定的人为主观因素,在复杂多变的工作环境下很难实现对转辙机故障的快速定位和及时维修。因此,研究道岔转辙机智能故障诊断对保障高速列车的安全可靠运行和降低维修成本具有重要意义,是适应新形势下铁路运维智能化发展的方向。
近年来,国内外专家学者在道岔转辙机智能故障诊断方面已经开展了一些研究,并取得了一定的成果。文献[3]提出模糊神经网络的道岔故障诊断,通过某种特征提取方法提取特征,采用前馈神经网络完成故障类型的诊断,但是该方法的特征提取方式过于复杂且需要人工整理得到特征向量集,在实际应用中很难对转辙机故障快速定位。文献[4]提出一种自生成故障样本的智能故障诊断方法,通过LeNet卷积神经网络有效检测道岔故障,但是该方法以图像的形式输入,消耗大量计算机资源,对设备硬件要求较高。文献[5]提出一种半监督学习算法的道岔故障诊断方法,采用支持向量机对道岔进行故障分类,但该方法需要提取分段特征的预处理,相对来说比较繁琐。文献[6]提出一种基于深度学习的道岔故障诊断方法,采用卷积神经网络-门控循环单元组合模型对道岔进行故障诊断,具有较好的诊断率,但该方法的数据为单通道输入,相比多通道输入不能全面挖掘信号的信息。
上述文献主要是对信号在时域特征上和单通道输入上进行分析。虽然时域特征[7]能从不同角度反映道岔转辙机的故障状态,但是转辙机的动作功率存在突变性,具有非线性非平稳的特点。单通道输入[8]是直接分析原始的功率信号,相对来说不能充分挖掘功率信号中的隐藏信息。考虑到经验模态分解(Empirical Mode Decomposition, EMD)算法适用于非线性、非平稳的动作功率信号分析处理[9],能表达出不同频率的信息特征;一维卷积神经网络(One-dimensional Convolutional Neural Network, 1DCNN)在功率信号的卷积和池化操作过程中具有强大的特征学习能力,表现出更高的诊断精度[10];长短期记忆神经网络(Long-Short Term Memory, LSTM)可以对功率数据信息进行选择性保留,深层挖掘内部信息[11]。因此,本文提出一种基于多通道输入(Multi-channel Input, MC)和1DCNN-LSTM的道岔转辙机故障诊断方法(以下简称“MC-1DCNN-LSTM”),主要对道岔转辙机动作时的工作功率进行诊断并完成故障分类,实现对转辙机故障的快速定位。首先利用EMD算法对功率信号进行不同频率分解,通过方差贡献率筛选出最有效的3个固有模态函数(Intrinsic Mode Function, IMF)信号作为多通道输入;然后将多通道信号输入到1DCNN 中进行局部特征提取,利用LSTM从已提取的局部特征中选择性提取长距离特征;最后利用所建模型诊断出故障的类型,通过对比损失值、准确率、混淆矩阵诊断效果和t-分布随机近邻嵌入(t-distributed Stochastic Neighbor Embedding, t-SNE)诊断效果,来评估模型的有效性。
1 道岔转辙机动作过程分析
1.1 输出功率与工作拉力的关系
本文选取S700K道岔转辙机为研究对象。S700K道岔转辙机采用三相交流电动机,在道岔转换过程中输出功率P与工作拉力F之间的关系[12]为
( 1 )
式中:n、η、Re分别为转辙机电机的转速、转换效率、等效力臂,其值均为常数,故工作拉力F与输出功率P呈线性关系。在道岔转换过程中,F的变化能反应出转辙机的运行状态,从而可以根据P的曲线变化来判断转辙机的工作状态,因此本文通过动作时的工作功率数据来对S700K转辙机的工作状态进行故障诊断。
1.2 正常动作功率状态
S700K转辙机正常动作功率曲线见图1。
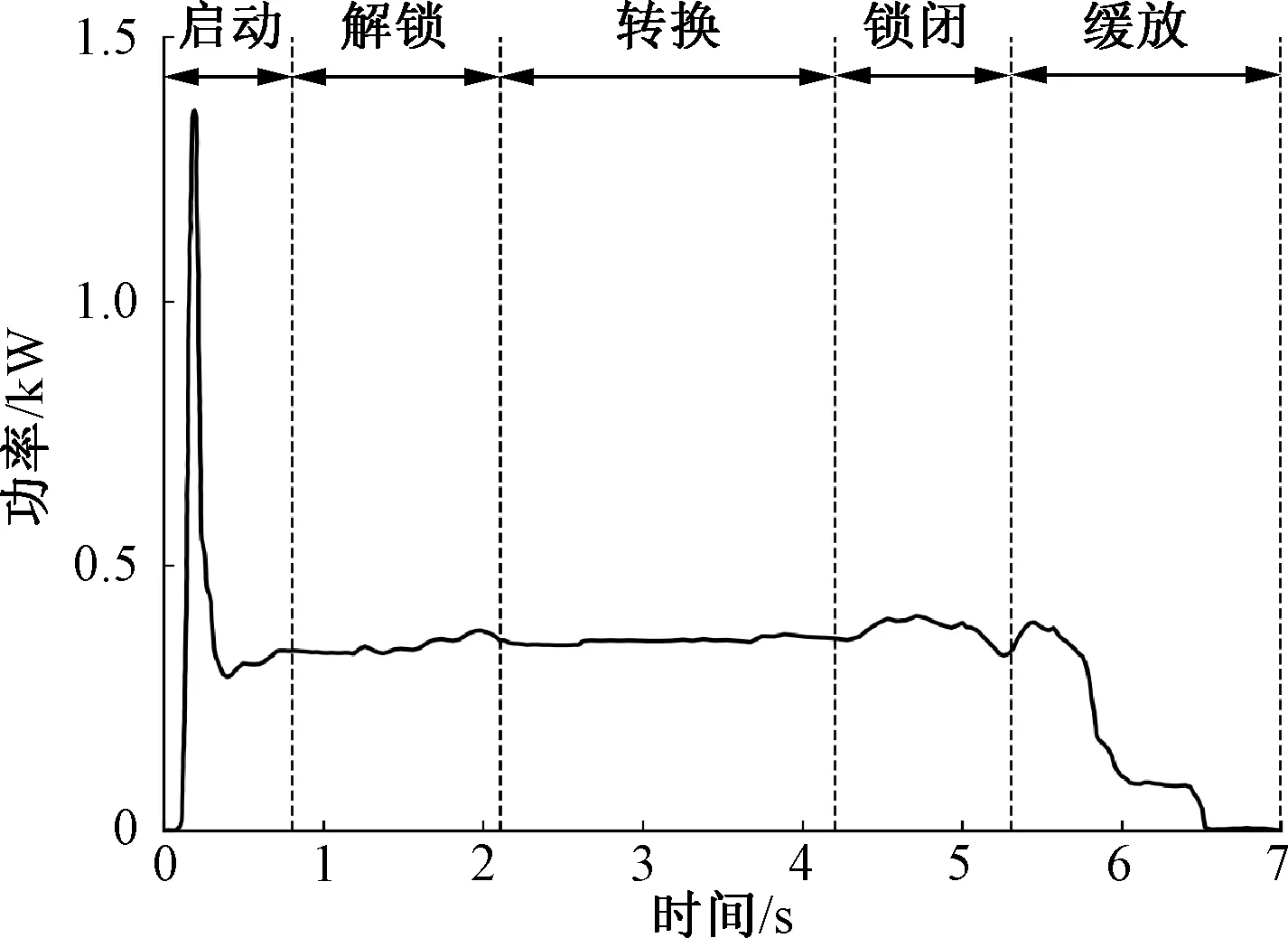
图1 S700K转辙机正常动作功率曲线
由图1可知,S700K转辙机正常动作功率曲线共分为5个阶段:启动阶段、解锁阶段、转换阶段、锁闭阶段、缓放阶段。其中,启动阶段,机械解锁需要把锁闭块顶出,故功率曲线快速上升并达到峰值,机械解锁后功率值下降至稳定值;解锁阶段,动作杆移动60 mm时,外锁闭装置解锁完成;转换阶段,电机开始推动尖轨动作,尖轨与基本轨实现密贴后结束;锁闭阶段,尖轨与基本轨实现密贴,此时表示杆的缺口中已经插入了锁闭杆;缓放阶段,启动电流只剩下A、C两相电流,此时会出现“小台阶”。当曲线的功率值保持为0 kW时,道岔的整个转换过程就已全部完成。
1.3 故障动作功率状态
通过相关调查研究,本文选取S700K道岔转辙机5种常见的故障类型进行诊断,其相应的动作功率曲线见图2。
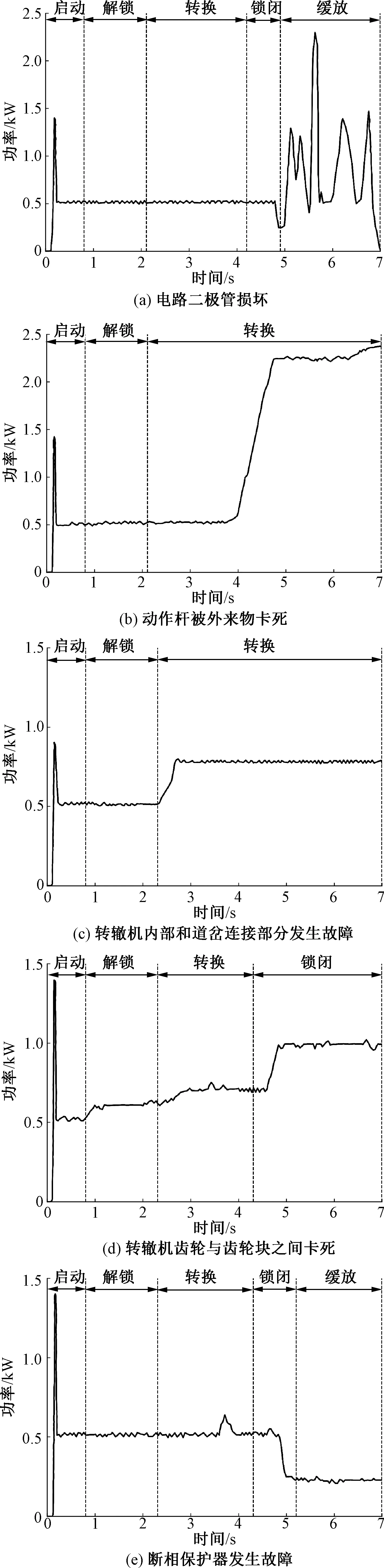
图2 S700K转辙机常见故障动作功率曲线
2 MC-1DCNN-LSTM模型
为更好地挖掘功率数据中隐藏的故障信息和提高道岔故障诊断精度,本文提出的MC-1DCNN-LSTM模型具有以下特点:①通过EMD算法分解动作功率信号,得到若干个IMF,其中仅有少数IMF与故障信息相关程度较高,将相关程度较高的IMF信号作为多通道输入,可以更有效地关注重点故障信息;②1DCNN具有局部连接和权值共享等特点,能自动提取输入的IMF信号数据特征,实现更高效的局部特征提取;③将1DCNN提取到的局部特征输入到LSTM网络中,利用LSTM捕捉局部特征中的长距离特征,可以更进一步挖掘功率数据中的关联特征和提高故障诊断精度。
2.1 经验模态分解
EMD作为一种自适应时频分析方法,有效地解决了基函数缺乏自适应的问题,根据输入信号的局部特征信息可以自适应分解为若干个尺度特征不同的IMF信号,因此EMD算法非常适用于非线性、非平稳信号的分解,具有很明显的优势[13-14]。
本文通过EMD算法对动作功率数据进行自适应分解。假设待分解功率信号为P(t),先确定P(t)所有的局部极值点,再用三次样条插值法对所有极值点进行拟合得到上包络线g(t)和下包络线k(t),进而得到上下包络线的平均值m1(t)为
( 2 )
用P(t)减去m1(t)得到第一个分量h1(t)。h1(t)成为IMF需要满足2个条件:①极值点数和零点数必须相等或相差最多不能超过1个;②上、下包络线相对时间轴局部对称。若不符合,则把h1(t)作为待分解信号重复以上步骤直至满足IMF条件。此时第一个IMF信号记为c1(t),残余分量r1(t)为
r1(t)=P(t)-c1(t)
( 3 )
将r1(t)作为待分解信号重复以上步骤,直至rn(t)成为单调函数,即EMD分解结束。则功率信号P(t)可表达为
( 4 )
2.2 一维卷积神经网络
1DCNN适用于分析具有固定长度周期的一维信号,能从其中自动学习特征,并具有局部连接和权值共享等特点,极大程度上降低了故障诊断模型的复杂程度,从而可以节省计算机资源,实现更高效的故障诊断。1DCNN[15]网络通常由输入层、卷积层、池化层、全连接层和输出层构成,其结构见图3。
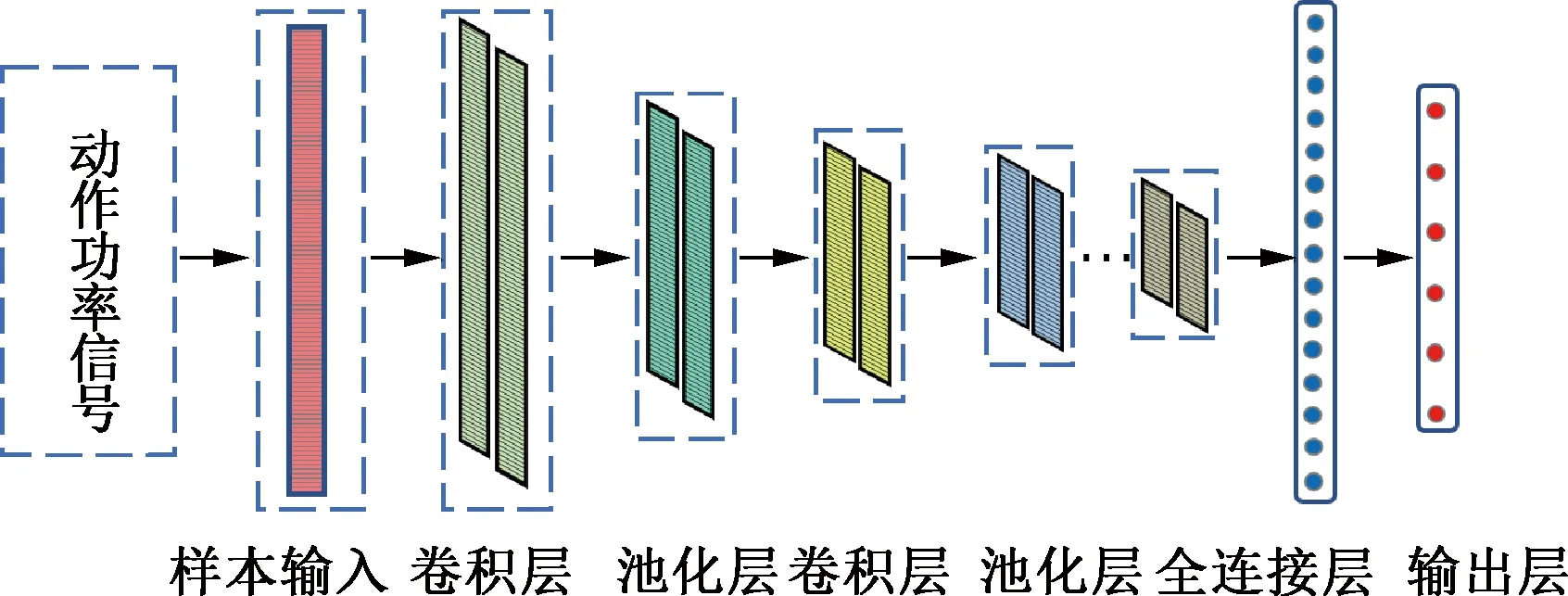
图3 一维卷积神经网络结构
考虑到信号微机监测系统监测的动作功率信号为一维信号,故本文将功率信号分解得到的IMF信号作为1DCNN[16]网络的输入,对其进行特征提取。
卷积层是对功率数据特征提取的关键,具体运算为
( 5 )

池化层是在对数据降维的同时保留最大信息量,本文选择最大池化的方式,具体运算为
( 6 )
2.3 长短期记忆网络
LSTM是循环神经网络的一个变种,有效解决了循环神经网络遇到的梯度消失和梯度爆炸的问题,非常适用于处理与时间序列相关的问题,使故障诊断模型更具优势。
LSTM[17]将1DCNN所提取的局部特征向量作为输入,学习其内部的特征变化规律并提取出长距离特征向量,从而挖掘功率信号内部的关联特征,进一步提高模型的诊断精度。LSTM的传输状态通过3个门结构来控制,分别是遗忘门、输入门和输出门。LSTM网络结构见图4,各变量具体表达为[18-19]
( 7 )
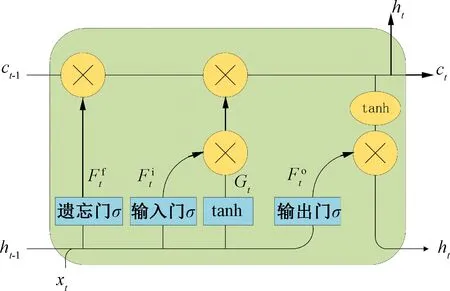
图4 LSTM网络结构
( 8 )
Gt=tanh(ωt[ht-1,xt]+bt)
( 9 )
(10)
(11)
(12)
3 实验结果与分析
3.1 数据采集
实验平台为某电务器材公司提供的S700K转辙机故障模拟平台,共设置5种常见转辙机故障,分别采集转辙机正常运行,以及表示电路二极管损坏、动作杆被外来物卡死、转辙机内部和道岔连接部分发生故障、转辙机齿轮与齿轮块之间卡死、断相保护器发生故障,共6种状态下的动作功率数据,转辙机转换时间为7 s,采样间隔为0.02 s,每个样本长度为350,每个状态下的样本量为1 500组,6种状态下的样本总量为9 000组,各种状态样本状况见表1。

表1 S700K转辙机6种状态样本状况
3.2 多通道输入构建
多通道输入将具有代表性的挑选样本输入到特征图的多个通道内,多个通道融合后的特征图能够充分挖掘数据的有效信息[20]。通过2.1节中的EMD算法对动作功率数据进行自适应分解,可以得到对应的IMF信号,本文仅给出动作杆被外来物卡死的功率信号分解,见图5。
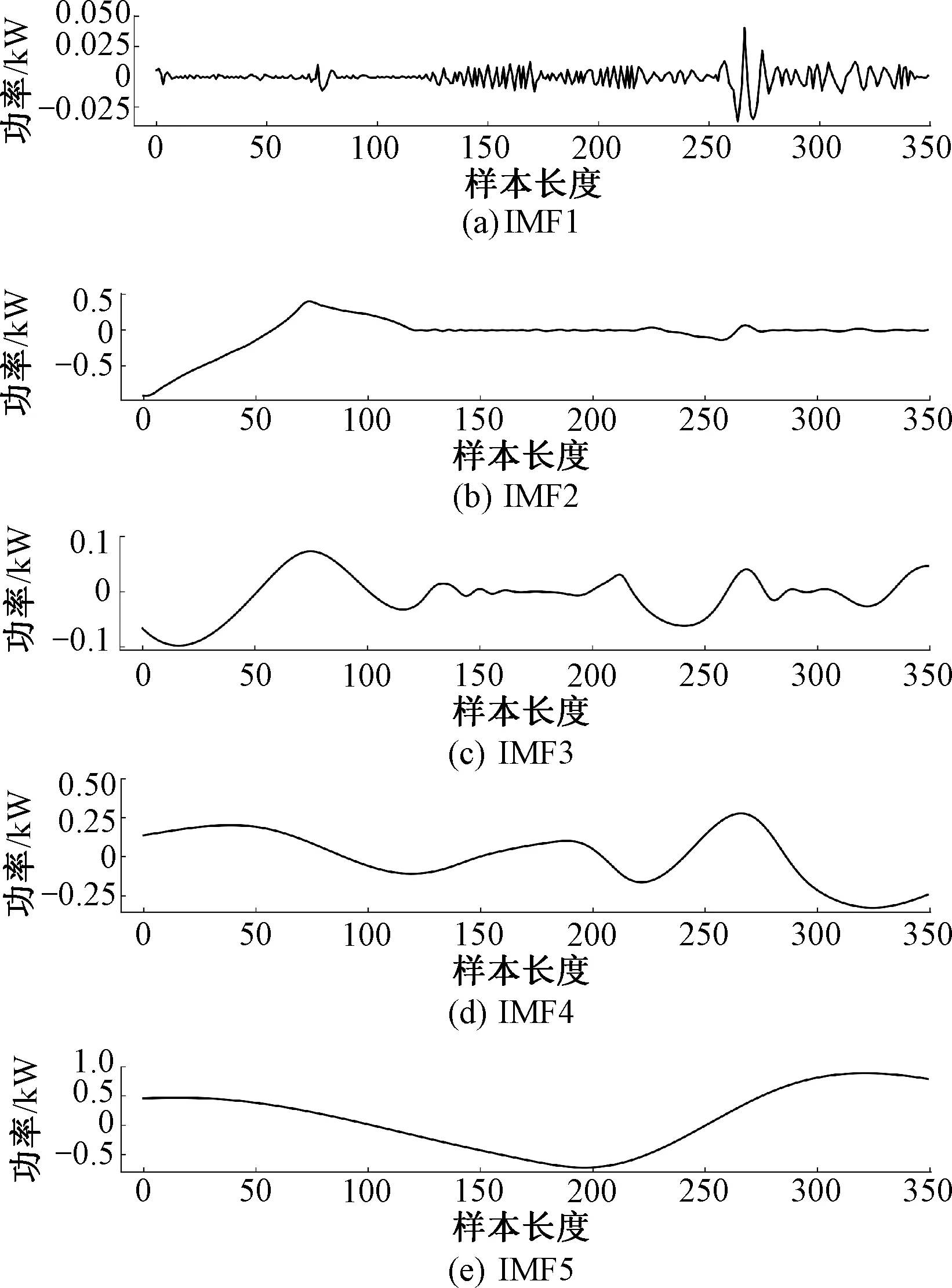
图5 EMD分解的时域信号
由图5可知,共有5层IMF信号,考虑到不同层对所分解的功率信号影响不同,本文通过方差贡献率筛选出最有效的IMF[21]。方差贡献率由各IMF信号方差与功率信号方差的比值构成,比值越高表示该IMF与功率信号相关程度越高。各层IMF信号的方差贡献率见表2。

表2 各层IMF信号的方差贡献率 %
由表2可知,IMF2、IMF4、IMF5与功率信号相关程度较高,所包含的故障信息最重要,故将其作为多通道输入,即本文所构建的为三通道输入,可以充分让1DCNN网络提取重要故障特征,提高诊断精度。
多通道输入之间的卷积操作见图6。图6中,展示了所构建的三通道输入特征融合过程,筛选的3个IMF信号先在各自的通道内完成一维卷积操作,再通过卷积后的输出进行求和操作,此刻卷积层开始对融合后的特征进行特征提取。
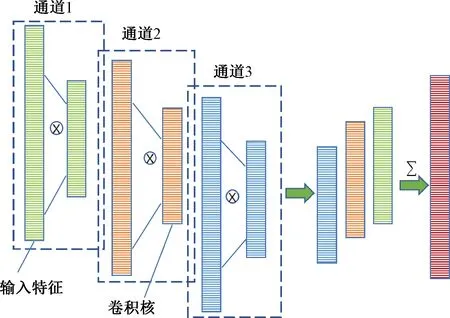
图6 多通道输入之间的卷积操作
3.3 MC-1DCNN-LSTM模型建立
本文提出的基于MC-1DCNN-LSTM的道岔转辙机故障诊断模型见图7。图7中,诊断模型由3个卷积层、3个池化层、2个LSTM层、1个展平层和3个全连接层组成,主要结构参数见表3。表3中,CS、C、N、S、P分别为卷积层卷积核的形状、通道数、数量、步幅、零填充的数量;Size、Stride分别为池化层卷积核的形状、步幅;Input_size、hidden_size、num_layer分别为LSTM输入层的特征维度、隐藏层的输出特征维度、隐藏层的数量;n为全连接层神经元数量。
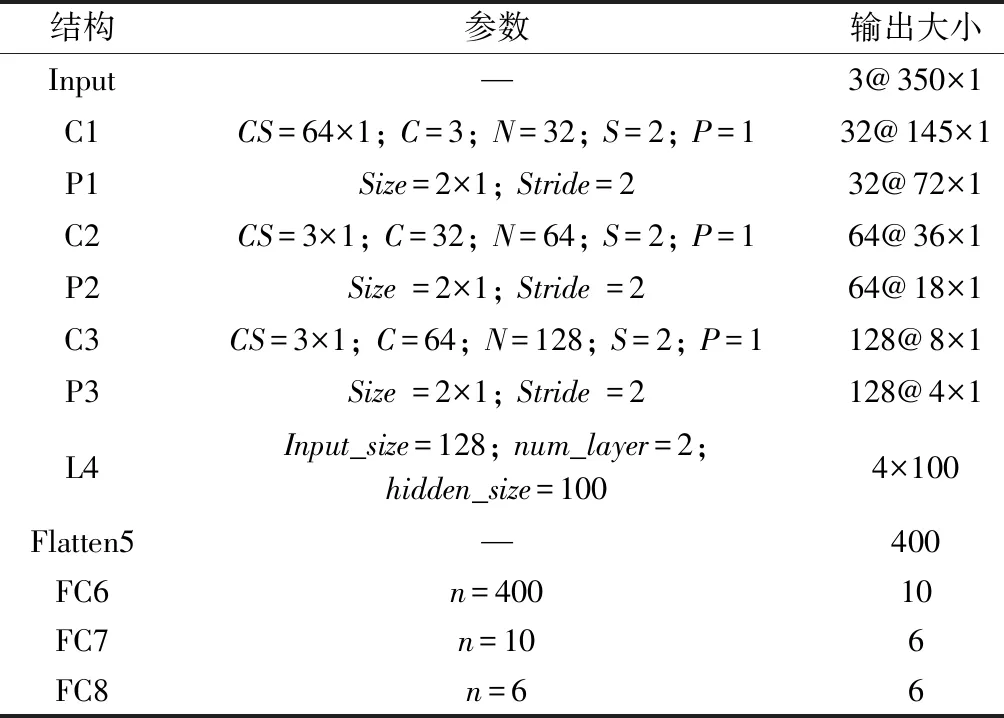
表3 模型主要结构参数
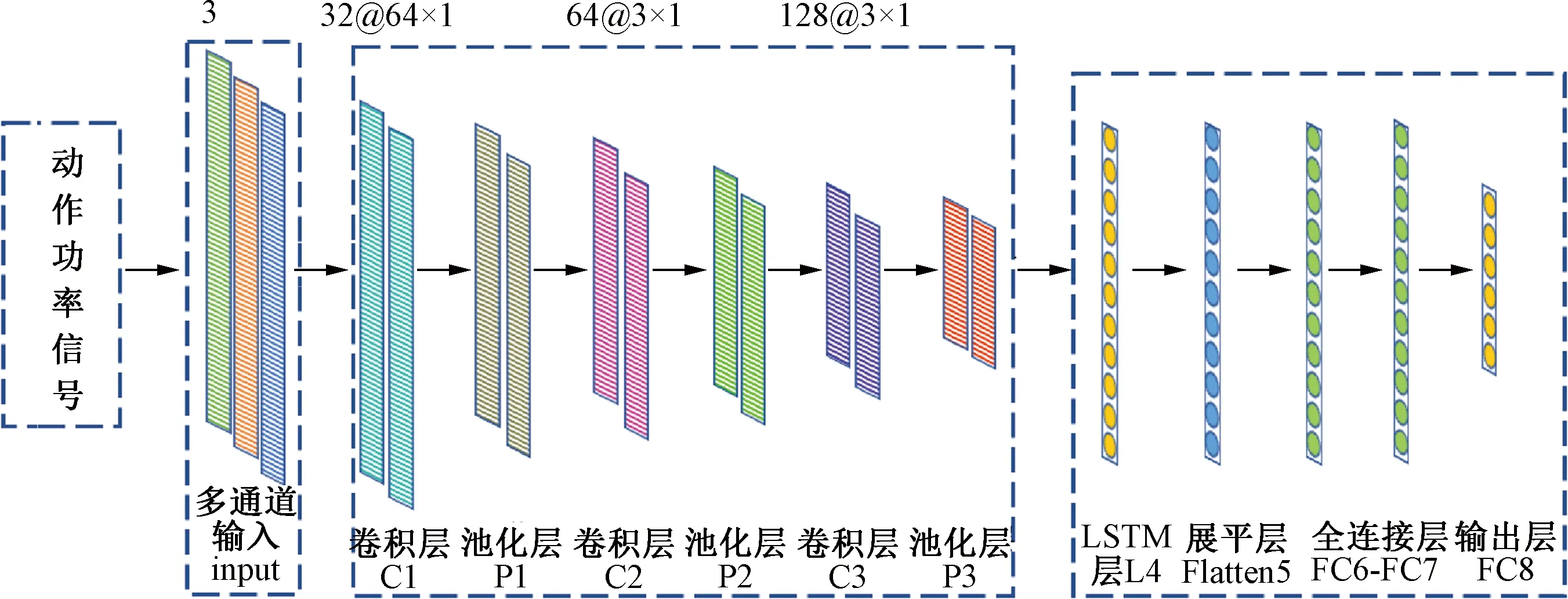
图7 基于MC-1DCNN-LSTM的道岔故障诊断模型
本文采用Pytorch的深度学习框架搭建MC-1DCNN-LSTM故障诊断模型:输入层为筛选出的IMF信号;卷积层的数量逐层叠加,通过观察卷积层输出特征图的效果和模型最终诊断效果来确定层数;为更好提取故障特征,逐层翻倍增加卷积层卷积核的数量来增加网络宽度;LSTM层采用2层的网络结构,均含100个隐藏层,能够充分学习故障数据中的长距离特征;Flatten5展平层用于将多维输出展平成一维;输出层采用全连接方式将模型的输出向量转换为诊断类别标签的维度。
模型训练采用Adam优化器更新参数,学习率设为0.001,该值通过观察模型学习速度和收敛速度得到最优解;为防止过拟合和梯度爆炸,权值衰减weight_decay由经验值设为0.000 5;采用交叉熵损失函数来衡量模型的诊断性能,批训练样本数量batch_size根据模型训练速度和精度设为32个样本,模型训练轮次Epoch设为100轮。
3.4 结果对比与分析
3.4.1 不同诊断模型对比实验
将本文建立的模型与5种经典的诊断方法进行对比分析,具体为:①LeNet[4],包含2个卷积层,2个池化层和2个全连接层;②DenseNet[22],前面所有层都作为下一层的额外输入,即实现特征重用;③VGG19[23],下一层通过上一层的输出特征来提取更加复杂的特征;④ResNet50[24],包含49个卷积层和1个全连接层,其解决了深度过大训练困难的问题;⑤LSTM-Attention[25],长短期记忆神经网络和自注意力机制组合,更加关注重要信息。6种模型分别在5 400组训练集上进行训练,故障诊断准确率、损失值见图8。准确率为不同模型诊断正确的样本数量占训练集样本数量的比例;损失值为通过交叉熵损失函数计算的各模型中真实类别概率分布与诊断类别概率分布之间的差距。
由图8(a)可见,6种模型随着迭代次数的增加均有着较高的故障诊断准确率,而本文模型相较于另外5种模型收敛效果和收敛速度都是最佳的,具有更强的特征学习能力和适应性。由图8(b)可见,本文所建的诊断模型相较于其他诊断模型有着更平稳的损失值变化,具有较好的鲁棒性。
为调整各模型的相关参数,本文在训练集训练的同时加入验证集进行验证,并以最小损失值为标准挑选最优的模型和参数。为衡量各自最优诊断模型的性能和诊断能力,分别在1 800组测试集上进行测试。通过混淆矩阵对各类诊断结果进行可视化展示,可以更直观地展示各模型测试诊断效果,混淆矩阵可视化诊断结果见图9。图9中,每一列为测试诊断类别,每一行为实际类别,对角线方块为各类诊断正确样本数量,其余为错误样本诊断数量。各种方法测试准确率比较结果见表4。表4中,平均准确率值为各类混淆矩阵内总的正确样本数量占测试集样本数量的比例。
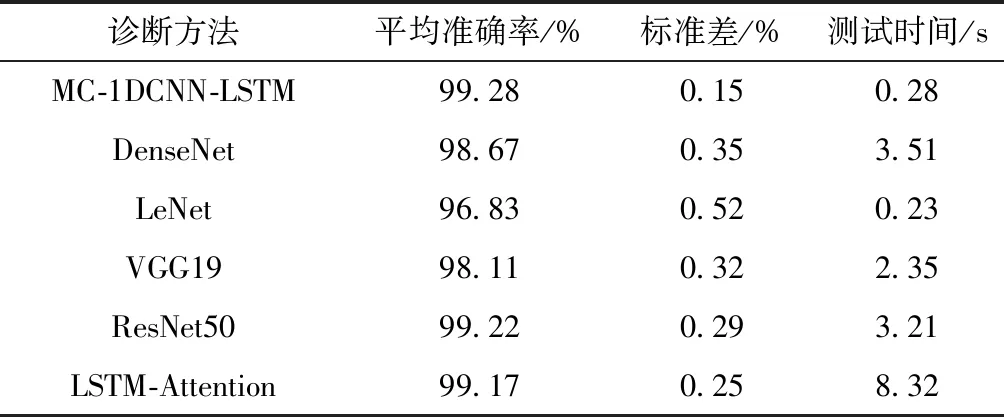
表4 各方法测试准确率比较
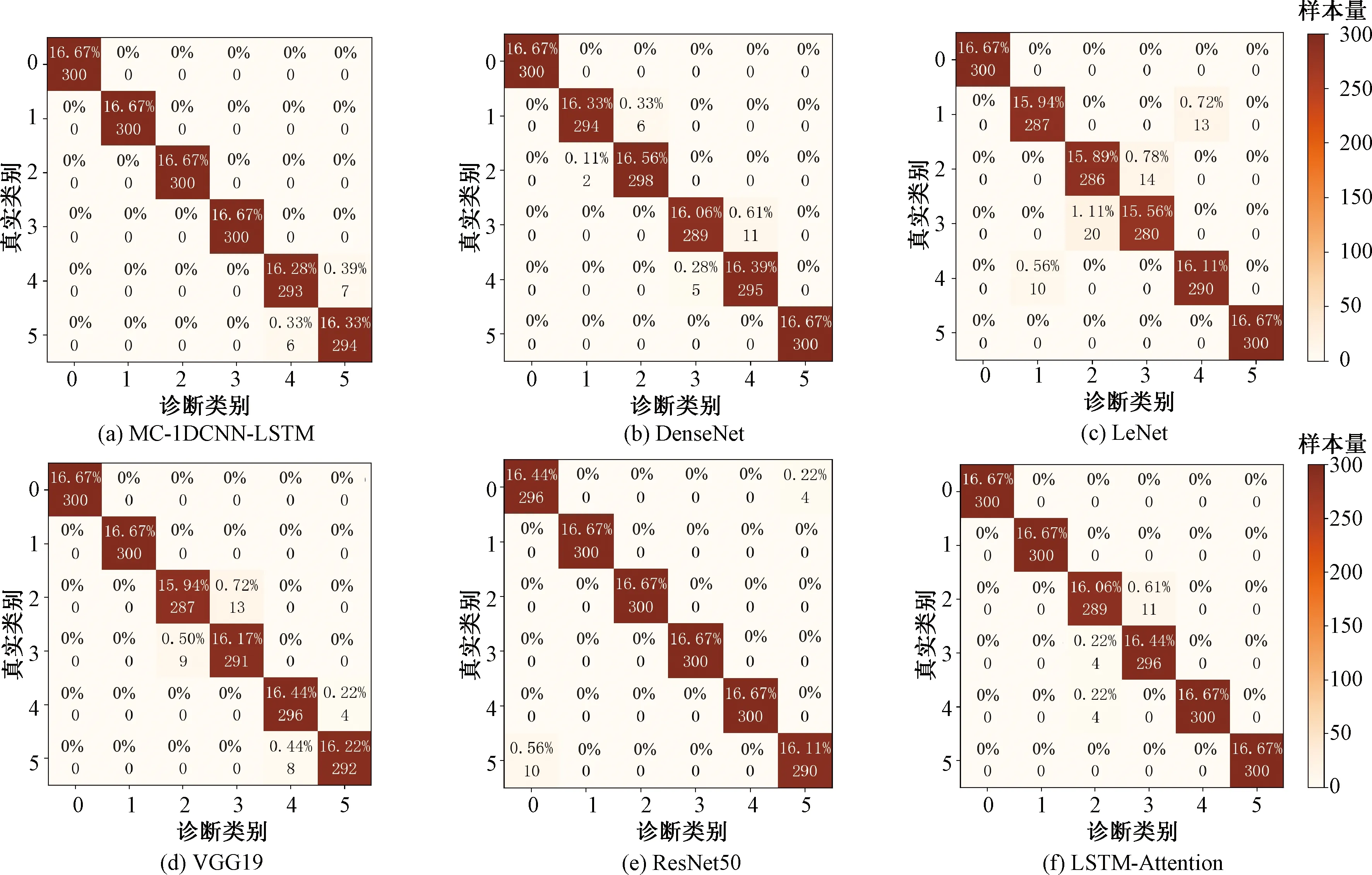
图9 混淆矩阵可视化诊断结果
由图9可见,相较于其他5种模型,本文所提出的MC-1DCNN-LSTM方法在诊断精度上更高,错误分类的数目最少。由表4的对比数据可知:本文方法准确率为99.28%,测试时间为0.28 s,相较于DenseNet、LeNet、VGG19、ResNet50,准确率分别增加了0.61%、2.45%、1.17%、0.06%,主要原因是本文方法加入了多通道输入和LSTM网络,多通道输入把主要故障信息作为输入,LSTM使各类的时间序列特征联系更加紧密;ResNet50诊断准确率与本文模型接近,但测试时间相对较长,主要原因是ResNet50网络卷积层层数较多,提取特征过程耗时大;LeNet的测试时间最短,但准确率相对不高,主要原因是模型结构较简单,提取特征能力稍弱;本文方法相较于LSTM-Attention准确率提升0.11%,LSTM-Attention也具有较高的准确率,但测试时间消耗较大,主要原因是LSTM后连接注意力机制网络,捕捉长序列中的依赖关系消耗时间较多。综合比较,本文建立的模型具有较高的诊断准确率和较好的鲁棒性,且对计算机硬件要求不高,验证了本文方法的有效性和泛化性。
3.4.2 消融实验
为进一步从内部结构的变化来验证本文所提算法的有效性和可行性,在保持其他实验设置不变的情况下,将单通道输入、多通道输入、1DCNN、LSTM进行组合搭配,通过不同网络的组合搭配来进行消融实验,消融实验产生的准确率比较结果见表5。表5中,SC为单通道输入。
表5 消融实验产生的准确率比较 %
由表5的对比数据可以发现:①当1DCNN中的输入方式由单通道输入变为多通道输入时,准确率提高0.65%,说明多通道输入把主要故障信息作为输入能进一步挖掘功率数据中的信息;②在以上网络中分别加入LSTM网络,模型的准确率分别增加了0.89%和0.42%,即LTSM网络把动作功率数据中的长距离特征信息联系得更加密切,进一步提高了模型的准确率。
3.4.3 t-SNE可视化分析
t-分布随机近邻嵌入(t-SNE)[26]是一种将高维数据转换为低维数据的方法,其基本思路是在二维或三维空间形成一个t分布,使其在高维空间构造概率分布一致。为观察MC-1DCNN-LSTM模型对S700K转辙机故障诊断效果,直观地展现模型各层中的特征学习能力,将1 800组测试样本作为模型的输入,利用t-SNE将模型中各层所学习的高维特征降到二维空间进行可视化,t-SNE特征可视化结果见图10。由图10(a)~图10(c)可见,经过3个卷积-池化操作后,6种状态具有一定的可分性;由图10(d)可见,经过LSTM层后各状态之间聚在一起,有更加明显的可分性;由图10(e)可见,经过全连接层FC8后,类与类之间距离较大,6种状态之间是完全可分的。
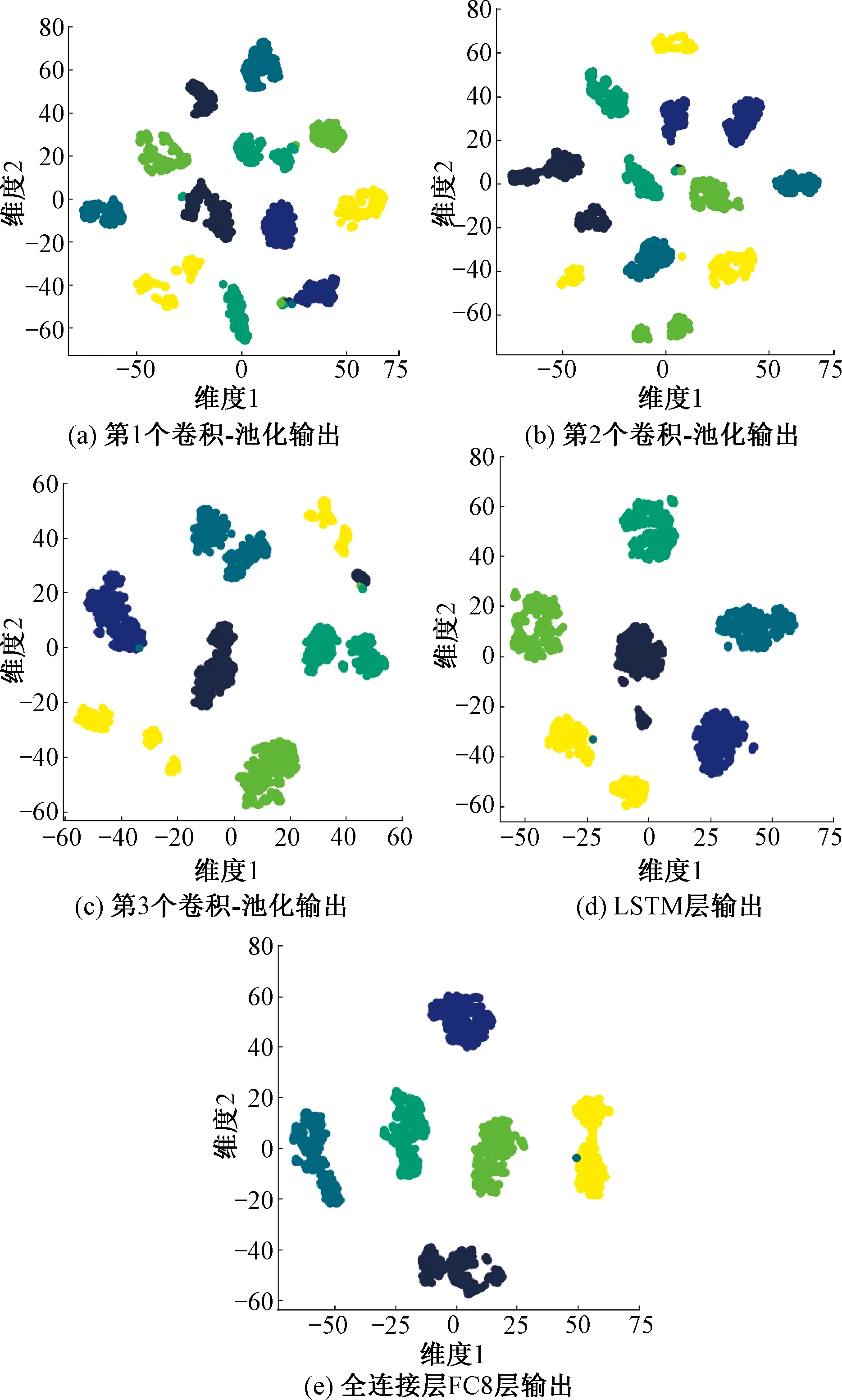
图10 t-SNE特征可视化结果
从图10可以得出,本文所建立的模型具有较强的特征学习能力,随着网络层数的增加能够逐渐区分6种状态,具有较强的故障诊断能力,验证了本文方法的有效性和优越性。
4 结论
本文根据S700K交流道岔转辙机的动作功率曲线为一维信号的特点,提出基于MC-1DCNN-LSTM的特征学习方法,很好地解决了S700K转辙机故障诊断问题。通过实验验证得出以下结论:
1)EMD算法将动作功率曲线自适应地分解为若干个频率不同的IMF信号,通过MC-1DCNN网络可以有效地将IMF信号融合在一起,并可以有效地挖掘动作功率信号的关键故障信息。
2)引入1DCNN-LSTM组合诊断模型,先用1DCNN网络提取转辙机功率数据中的局部特征,再用LSTM网络选择性保留信息来提取局部特征中的长距离特征,从而更深层挖掘功率信号内部的关联特征。
3)与传统的卷积神经网络模型相比较,本文所构建的模型对计算机的性能要求较低,且诊断时间短,显示出更好的故障特征学习能力和诊断能力,也验证了本文方法的有效性和优越性。
猜你喜欢
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年1期)2020-09-21
铁道通信信号(2020年10期)2020-02-07
铁道通信信号(2019年3期)2019-04-25
铁道通信信号(2018年10期)2018-12-06
铁道通信信号(2018年10期)2018-12-06
铁道通信信号(2016年6期)2016-06-01
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28
凿岩机械气动工具(2014年3期)2014-03-01
振动、测试与诊断(2014年5期)2014-03-01