抑制LCC-HVDC后续换相失败的改进型电流偏差控制策略
2024-03-11 01:19辛业春刘奇王拓崔远卓江守其
电力建设 2024年3期
辛业春,刘奇,王拓,崔远卓,江守其
(东北电力大学电气工程学院,吉林省吉林市 132012)
0 引 言
我国能源中心与负荷中心呈现逆向分布的特点,电网换相高压直流输电(line commutated converter high voltage direct current,LCC-HVDC)在远距离大容量输电、异步电网互联等场合具有显著优势,在我国“西电东送”与“全国联网”战略中扮演着十分重要的角色[1-5]。换相失败是LCC-HVDC系统典型的故障,交直流系统故障引起首次换相失败后,若不采取有效的抑制手段容易导致后续换相失败,进而导致直流闭锁,引发大容量功率缺失,威胁大电网安全[6-10];相较于首次换相失败,后续换相失败的发生机理更加复杂,其发展过程的时间尺度更长,通过优化控制策略降低其发生概率具有现实可行性,因此对于LCC-HVDC后续换相失败机理分析与控制策略的研究成为必然[11-15]。
目前的研究大多从现象入手,通过控制器参数优化以及控制系统改进两方面进行后续换相失败的抑制。在系统控制器参数优化方面,文献[16]从无功角度入手,对低压限流(voltage dependent current order limiter,VDCOL)控制参数设置深入研究,提高了直流输电系统的稳态及动态性能。文献[17]提出了基于直流电流变化率的变斜率低压限流控制方案,一定程度上提高了系统抵御后续换相失败能力。
在控制系统改进方面,学者们提出了诸多方案。文献[18]通过分析电流偏差控制中斜坡函数斜率对系统恢复的影响,提出一种自适应电流偏差控制方法,根据交流故障严重程度动态调整斜坡函数斜率,在对称及不对称工况下对于提高后续换相失败免疫能力均有较好表现,但不对称故障工况下斜坡函数斜率在较长时间内维持较高水平不利于功率的快速恢复。文献[19]将电流偏差控制与VDCOL相结合,提高了逆变侧控制器之间的协调配合能力,对系统提高后续换相失败免疫能力有积极影响。基于文献[19]的理论基础,文献[20]分析证明了VDCOL控制作用期间不会发生换相失败,并对现有控制系统进行改进,通过理论计算得到关断角补偿量,对系统进行实时动态补偿,控制易于实现,在提高系统后续换相失败抵御能力同时也提高了功率传输能力。文献[21-22]由交流系统故障严重程度动态调节电流偏差控制斜坡函数以及关断角增量,一定程度上提高了后续换相失败抵御能力,但斜坡函数斜率与关断角增量多依赖仿真结果,理论分析存在不足。
综上可知,现有研究在控制系统改进方面取得了一定的效果,但LCC-HVDC系统控制结构复杂,故障恢复期间逆变侧因控制器交互不当而引发后续换相失败这一根本性问题尚未解决,对于控制器多次交互带来的不利影响现有研究略有不足,并缺少针对性的抑制措施。
基于上述现状,本文通过分析故障后各时段换流器控制交互影响的机理,基于各阶段的动态轨迹分析,确定后续换相失败风险高发时段,针对性地提出一种改进型电流偏差控制策略。最后在PSCAD/EMTDC仿真平台以CIGRE标准模型为算例,对本文所提改进型电流偏差控制策略进行了仿真验证。
1 换相失败基本原理
LCC-HVDC由半控型晶闸管器件构成,当交直流系统发生故障造成电压跌落时,可能导致系统不满足换相条件,引发换相失败[23-24]。换相失败是指刚退出导通的阀还未恢复阻断能力又重新变为导通状态[25],换相过程如图1所示。
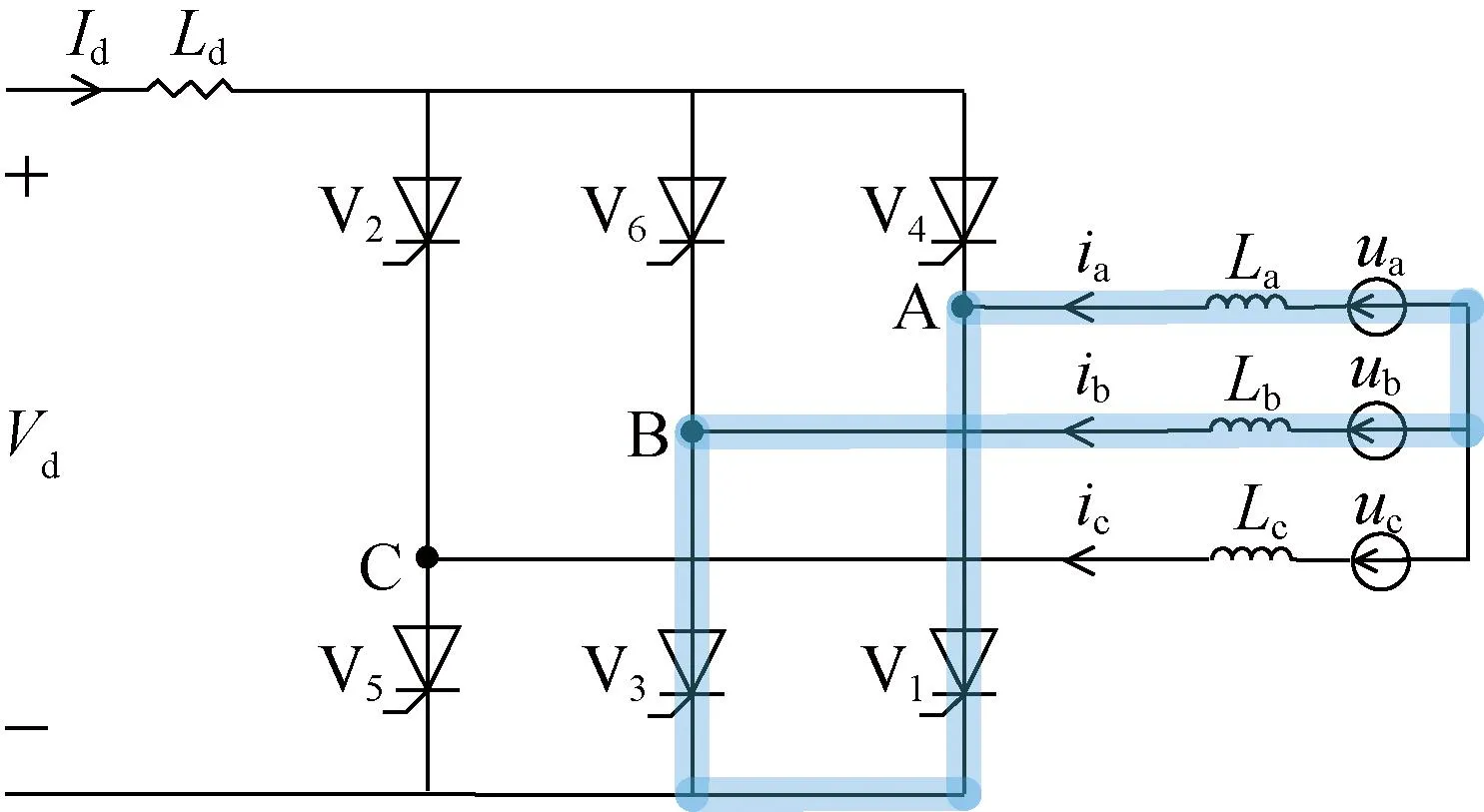
图1 换相过程等效电路Fig.1 Equivalent circuit of commutation process
LCC-HVDC的阀导通顺序是阀V1至阀V6依次导通60°,ia和ib分别为V1、V3阀上流过的电流;La和Lb为桥臂等值电感;ua和ub分别为A相和B相电压。
换相过程中由于ub>ua,桥臂电流ia逐渐由直流电流Id降为0,ib从0逐渐增大到Id,回路中电流方向为逆时针,满足ia+ib=Id,由图1换相过程等效电路可得到换相面积[26]:
(1)
式中:X为换流器等值电抗;α为触发角;μ为换相角;ω为工频角速度;L为换相电感;S为换相面积,如图2所示。
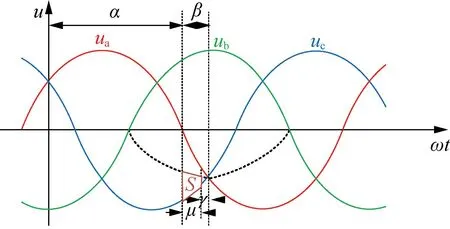
图2 换相面积示意图Fig.2 Commutation area diagram
各角度间满足α+β=α+μ+γ=π,由式(2)可求得关断角:
(2)
式中:UL为线电压有效值;β为超前导通角;φ为系统不对称故障时电压过零点偏移角,对称故障时偏移角为0。当γ小于晶闸管恢复正向电压阻断能力所需的最小关断角γmin时,系统将会发生换相失败。由式(2)可知,关断角的大小受直流电流Id,交流电压UL以及逆变侧输出的超前导通角βinv共同影响,而超前导通角βinv在不同时段下由不同的控制方式决定,若在某一时刻下β的变换规律无法适应其他电气量的变化速度时,可能使关断角下降,当γ低于γmin时,就会导致换相失败[27-28]。
2 换相失败后系统恢复过程分析
2.1 逆变侧控制结构
LCC-HVDC系统采用分层控制,根据响应速度由快到慢可分为阀控制级、极控制级和主控制级[29-30]。LCC发生换相失败后各电气量恢复水平由βinv控制,图3展示了LCC-HVDC逆变侧控制器结构,控制系统包括定关断角控制、电流偏差控制(current error control,CEC)、定电流控制以及VDCOL控制环节。
图3中,Id-ord为主控制级发出的电流指令值,其与VDCOL控制输出电流相比较,取较小者Idr-ord经通信装置传输至整流侧,同时减去整流侧与逆变侧电流裕度后与逆变侧电流实测值做差,经PI控制器输出βCC。
定关断角控制输入分为两部分,分别为逆变侧实际关断角一周期内最小值与整定值之差,以及电流偏差控制输出的补偿关断角。两部分之和经PI控制器输出βCEA。
逆变侧控制系统输出的βinv由其中较大者决定即βinv=max{βCC,βCEA},这表明系统由故障发生到恢复稳态过程中,逆变侧控制系统输出的βinv在不同时间尺度下受控于不同的控制模式,控制系统将多次交互[31-32]。
2.2 故障恢复过程分析
LCC-HVDC系统换相失败后故障恢复期间系统运行曲线如图4所示。由图中运行点移动轨迹可以看到,LCC-HVDC稳态时系统运动点为A点,故障恢复过程系统运行点经历A-B-C-D-E-F-A重新达到稳态,此过程中逆变侧控制方式发生多次变化,下文将结合典型仿真案例对故障恢复过程中系统运行点移动轨迹及逆变侧控制方式切换规律作详细分析。
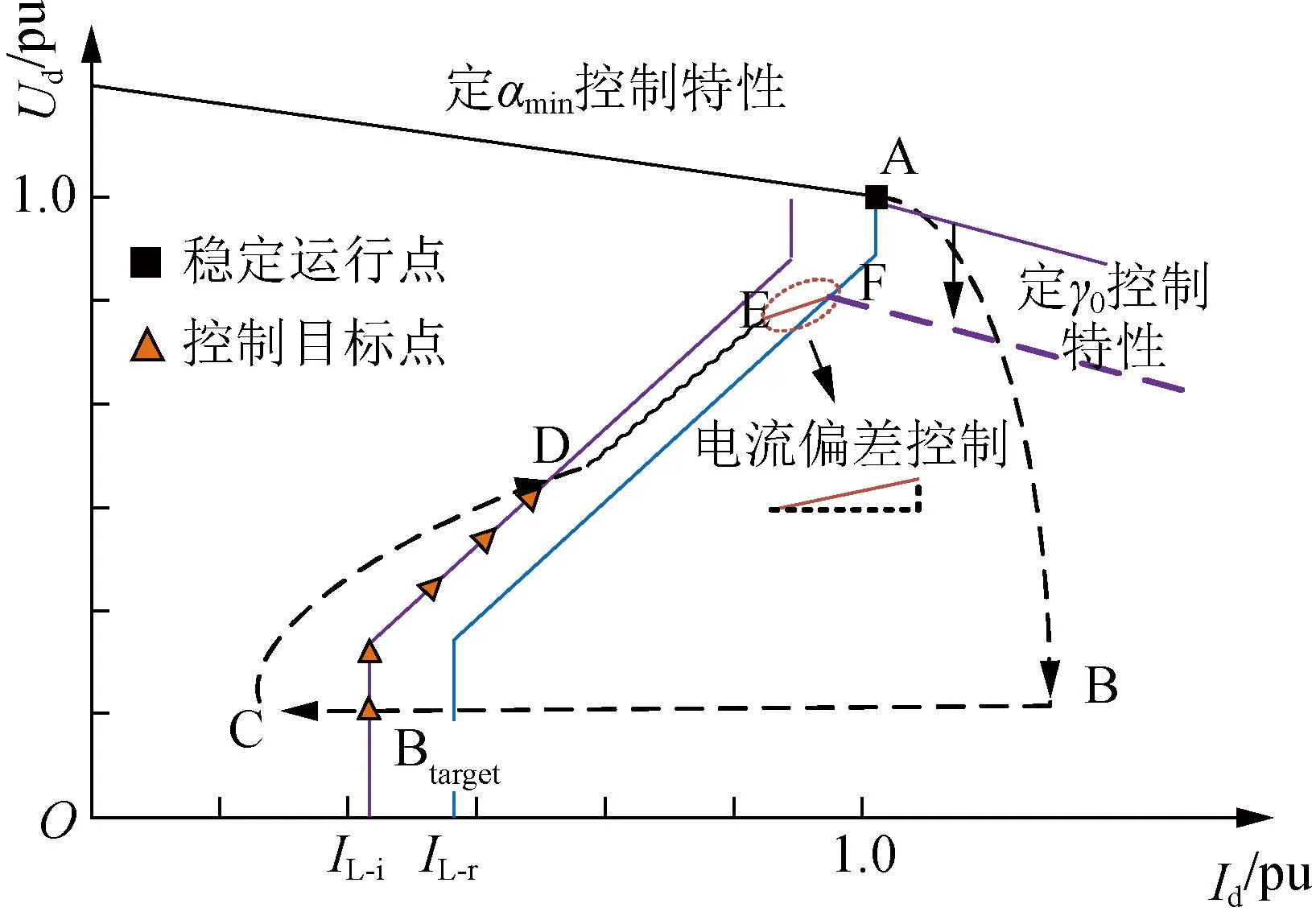
图4 故障恢复期间系统运行曲线图Fig.4 System operation curve diagram during fault recovery
为便于理解,本文以CIGRE标准直流输电系统为例,设置典型仿真场景,控制结构与图3保持一致,关断角整定值设为15°,最小关断角设为7.2°,在逆变侧换流母线处设置三相接地故障,接地电感L=0.4 H,发生故障时刻为2.5 s,在0.5 s后切除故障,各电气量动态轨迹如图5所示。

图5 故障后逆变侧控制系统参数动态轨迹Fig.5 Parameter dynamic trajectory of inverter side control system after fault
图5中电气量分别为关断角γ、定电流控制以及定关断角控制输出量βCC和βCEA、电流偏差控制输出补偿关断角ΔγCEC,根据图4中系统运行点变化曲线及图5中各控制策略输出量变化情况,将故障恢复状态划分为4个阶段:
阶段a:换相失败初始阶段。
由图5可知,阶段a中ΔγCEC输出始终为0,说明控制尚未投入,逆变侧超前导通角βinv=max{βCC,βCEA},逆变侧处于定关断角控制状态,整流侧则处于定电流控制。
LCC逆变侧在2.5 s发生短路故障后,交流母线电压迅速下跌,直流电流快速升高,由图4可以看到,此时系统的运行点由稳态时A点运行到B点。并且由公式(2)可知,直流电流与交流电压的比值突增会导致关断角快速降低,当其数值低于极限关断角就会导致换相失败,由于其产生的时间尺度很短,逆变侧的控制系统来不及动作,因此首次换相失败往往无法避免。
系统发生换相失败后,关断角会迅速降为0,由图3逆变侧控制系统可知,此时定关断角控制输入的关断角实测值与整定值偏差增大,经PI控制输出的超前导通角β也会快速上升,如图5所示。而VDCOL控制(作用于整流侧)投入的时间通常在10~20 ms,即阶段a的后半程低压限流控制才开始投入,因通信存在一定的延时,因此该阶段系统电流未能下降至VDCOL控制中IL水平附近,系统仍处于换相失败过程中。
阶段b:逆变侧控制器投入阶段。
由图5可知,VDCOL控制作用后,电流偏差控制的启动标志着系统恢复进入阶段b,电流偏差控制输出一部分关断角补偿量ΔγCEC作为定关断角控制的输入,加大了定关断角控制PI的输入,使得定关断角控制输出的βCEA进一步增大,因此阶段b系统仍处于定关断角控制当中。
VDCOL控制作用后,系统电流被强制降低,系统处于一种“低电压,小电流”的运行状态,由图4可以看到,此时系统的运行点已经由B点(换相失败后直流电流上升的峰值点)向着Btarget点运动,由于该阶段整流侧与逆变侧控制目标一致,都为降低直流电流,直流电流超调,系统运行点落在控制目标点附近,记为C点。
阶段c:控制器交互第一阶段。
从图5可以看到,2.55 s时控制系统进行了第一次切换,标记为E1点,逆变侧切换为定电流控制状态。
在阶段b结束后,此时逆变侧输出的超前导通角βCEA已经远远超过系统稳态运行时的水平,因此定关断角控制开始动作,快速降低βCEA,而在阶段b恢复过程中,定电流控制同样开始动作,在VDCOL控制投入之后定电流控制输出βCC增大,二者相交于E1点,逆变侧系统进行第一次控制交互,在该恢复阶段,直流电流同时受控于整流侧与逆变侧,由图4可知,该阶段系统运行点由C点向E点过渡。
整个阶段c恢复过程中,系统的各电气量快速恢复,直流电流Id沿低压限流恢复曲线增加过程中,定电流控制的PI输入差值逐渐减小,此时逆变侧输出的超前导通角βinv呈现逐渐降低的状态。但由于阶段c初始时刻关断角已经远超稳态时的运行水平,因此在阶段c的恢复过程中,系统关断角对比临界关断角始终留有较多裕度,因此该阶段不易发生后续换相失败。
阶段d:控制器交互第二阶段。
由图5可知,逆变侧定关断角控制输出曲线βCEA与定电流控制输出曲线βCC于E2点再一次相交,逆变侧控制系统进行第二次交互。
在阶段c恢复过程中,定电流控制输出βCC持续降低,而定关断角控制输出βCEA呈上升趋势,逆变侧系统进行第二次控制交互,相交于E2点,由于逆变侧控制模式的切换,此时直流电流仅由整流侧控制,控制目标的明确使得Id快速贴近整流侧电流指令值,而整定值与系统实际测量值之差迅速减小就会导致该阶段电流偏差控制的输出快速降为0。
2.3 后续换相失败风险分析
由图2逆变侧控制系统可以看到,定关断角控制的输入量可以分为两部分,分别为关断角整定值与实测值的偏差量,以及电流偏差控制输出补偿关断角ΔγCEC,2.2小节分析指出,恢复阶段d即控制二次交互阶段。关断角已经恢复到稳态值附近,当关断角降低至整定值后继续降低时,其偏差量增大,经PI控制环节后输出βCEA也应增大,以此来保证关断角在整定值附近不再发生变化。但电流偏差控制输入的关断角补偿量在阶段d大幅降低,导致在阶段d定关断角控制处于失效状态,系统在关断角持续降低的情况下并未增大βCEA来增大关断裕度,因此该阶段系统容易发生后续换相失败。
逆变侧控制结构的复杂性决定了控制系统输出的βinv在不同时间尺度下受控于不同的控制模式,控制器二次交互过程即电流偏差控制作用阶段极易引发后续换相失败。
3 改进电流偏差控制策略
根据前文分析可知,LCC-HVDC系统发生换相失败后,在恢复阶段d过程中,由于逆变侧控制模式的切换,使得直流电流短时间内快速靠近整流侧电流指令值,在此期间,关断角补偿量ΔγCEC的骤降导致定关断角控制失灵,关断角持续下降,极易引发后续换相失败,因此本文针对性地提出一种改进型电流偏差控制策略,通过电气量的比较确定控制投入条件,增加信号采集与维持环节保证阶段d定关断角控制正常运行,引入平滑退出函数使控制平稳退出,在增加系统后续换相失败抵御能力的同时,保证了系统的高质量运行状态。控制框图如图6所示。
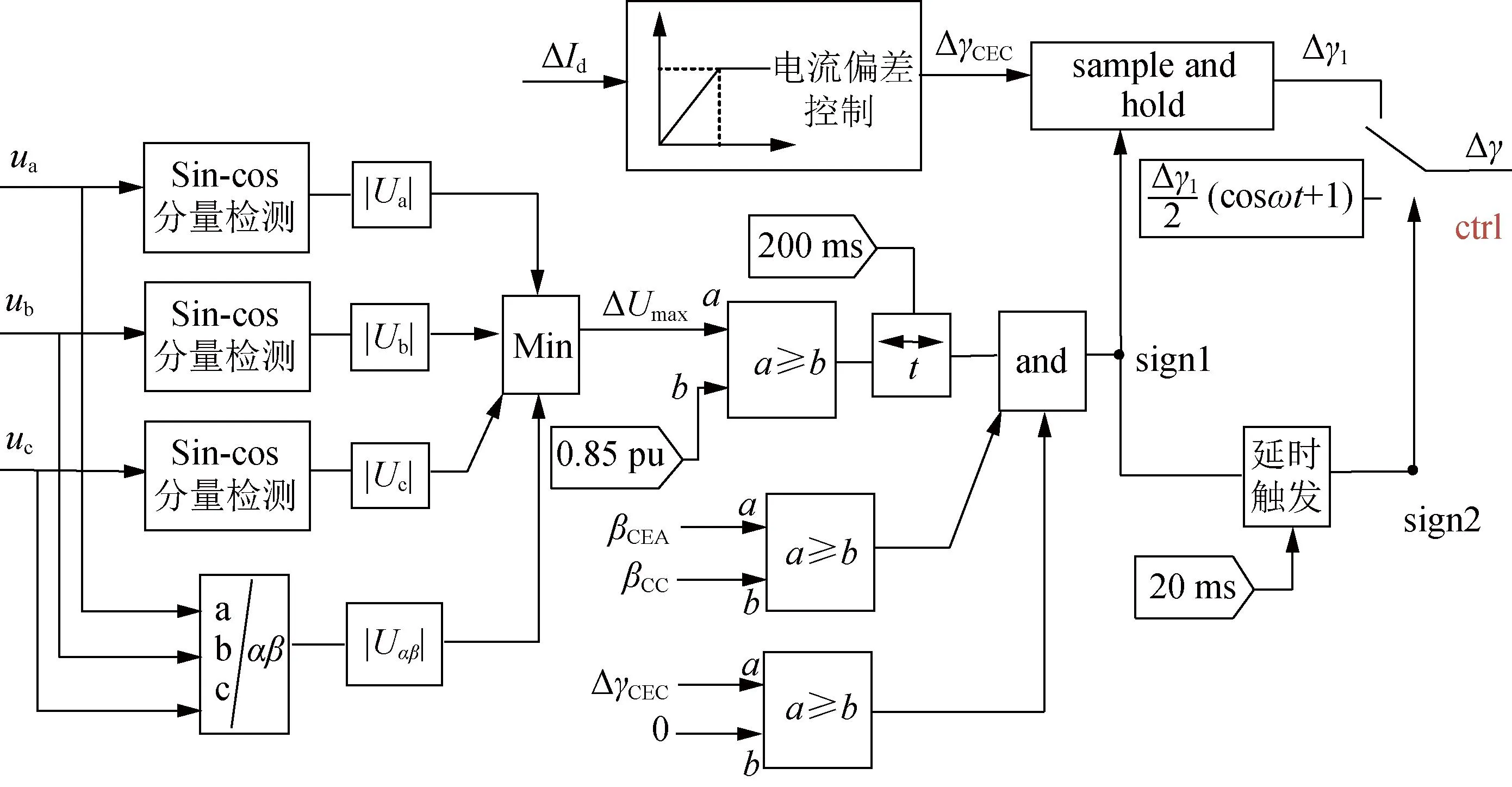
图6 改进型电流偏差控制框图Fig.6 Improved current deviation control block diagram
由图6可以看到,本文所提改进型电流偏差控制投入的条件必须同时满足以下3点:
1)换相电压低于设定值;
2)βCEA>βCC;
3)关断角补偿量ΔγCEC>0。
交流母线电压幅值采用正余弦分量法[33]进行实时检测,当检测到交流电压低于设定值0.85 pu时认为其具有换相失败风险,考虑到系统从换相失败发生到恢复稳态通常需要200 ms左右的时间,因此将其输出的高电平信号展宽200 ms,同时若系统发生首次换相失败,恢复过程中必然经历前文分析的4个阶段,当同时满足βCEA大于βCC且电流偏差控制输出的关断角补偿量ΔγCEC大于0时,系统处于恢复阶段d,此时本文所提改进型电流偏差控制投入,将同时符合以上三个条件的高电平信号sign1输入信号采集与维持元件(sample and hold)中,目的在于将该阶段电流偏差控制输出维持不变,使定关断角控制PI准确识别系统关断角运行状态,避免关断角γ在低于设定值后继续下降导致的后续换相失败。
为防止本文所提改进控制突然退出对系统造成冲击,将信号sign1经过延时处理(sign1高电平信号结束后输出20 ms高电平信号)记为sign2,sign2信号展开期间,令sign1作用期间维持不变的Δγ1缓慢下降至0,通常采用固定斜率直线下降的方式退出,为进一步减弱控制退出对系统造成的冲击,经大量实验仿真,本文选取退出效果更佳的三角函数作为控制平滑退出函数:
(3)
式中:Δγ1为sign1是高电平时原电流偏差控制输出补偿量;Δγ为改进后电流偏差控制输出补偿量。
考虑到电流偏差控制输出的关断角补偿量作为逆变侧定关断角控制输入的一部分,Δγ变化过于剧烈会对系统造成一定程度的冲击,平滑退出函数选择三角函数的优点在于:三角函数近似与关断角补偿量ΔγCEC开始下降时刻、ΔγCEC接近于0时刻的关断角补偿量曲线呈现相切关系,系统控制切换最为平滑,此时对系统造成冲击最小,有利于系统快速恢复至稳态。为验证控制平滑退出函数选取三角函数时系统恢复效果优于其他函数,本文选取角频率ω=50 rad/s,在对称及不对称两种工况下,分别采用三角函数的退出方式与固定斜率直线下降的退出方式对比系统的恢复效果。
工况I:典型三相接地对称故障。
逆变侧交流母线处设置感性接地故障,故障时刻为2.5 s,0.5 s后切除故障,接地电感值Lf=0.4 H,两种控制退出方式的相关电气量对比如图7所示。

图7 三相对称故障下两种控制退出方式
由图7电气量对比可以看到,两种控制退出方式均可以抵御后续换相失败,但在2.62 s左右系统受到第二次冲击时,三角函数式控制退出方式留有更多的关断角裕度,同时功率曲线更为平滑,恢复速度更快。
工况Ⅱ:典型单相接地不对称故障。
逆变侧交流母线处设置感性接地故障,故障时刻2.5 s,0.5 s后切除故障,接地电感值Lf=0.45 H,两种控制退出方式的相关电气量对比如图8所示。

图8 单相不对称故障下两种控制退出方式
由图8电气量对比可以看到,在单相不对称工况下采取两种控制退出方式都未发生后续换相失败,而当控制退出方式采取三角函数时,控制器二次交互期间,三角函数式控制退出方式关断角裕度仍高于固定斜率式退出方式,同时功率曲线更为平滑,因此本文选取三角函数作为控制平滑退出函数。
4 仿真验证
4.1 仿真分析
为验证本文所提改进电流偏差控制策略对后续换相失败的免疫能力,分别通过对称以及不对称工况进行测试验证。基于CIGRE标准测试模型,对以下三种控制策略进行对比:
控制策略Ⅰ:CIGRE标准测试系统;
控制策略Ⅱ:文献[18]所提自适应电流偏差控制,其可代表动态电流偏差控制相关抑制策略;
控制策略Ⅲ:本文所提改进电流偏差控制策略。
工况Ⅰ下相关电气量如图9所示。

图9 三相对称故障下系统动态响应Fig.9 System dynamic response under three-phase symmetrical fault
从图9可以看到,该工况下接地电感Lf较小,对应于工程实际中较为严重的故障,系统恢复状态可由关断角、直流功率及交流电压恢复程度表征,当采用控制策略Ⅰ即CIGRE原控制方式时,系统发生了后续换相失败,而采用文献[18]所提自适应电流偏差控制策略以及本文所提改进电流偏差控制策略时,系统未发生后续换相失败,由图9(d)可以看到,2.62 s左右本文所提改进电流偏差控制的投入将关断角补偿量在短时间内维持不变,逆变侧切换至定关断角控制后系统正确识别关断角运行状态使定关断角控制能够正常运行,避免了后续换相失败。
控制策略Ⅱ通过自适应调节电流偏差控制的斜坡函数,增大故障恢复期间CEC关断角补偿量的输出,同样可以防止系统出现后续换相失败,但由仿真结果可以看到,整个故障恢复期间控制策略Ⅱ输出的关断角补偿量较多,从图9(b)交流母线电压和图9(c)直流功率恢复曲线可知,控制策略Ⅲ的电气量恢复状态要优于控制策略Ⅱ,故障恢复期间控制策略Ⅲ对比控制策略Ⅱ能多传输0.15 pu的直流功率,大幅提高了故障恢复期间的功率传输能力,为受端系统提供更高的稳定裕度。
工况Ⅱ下相关电气量如图10所示。
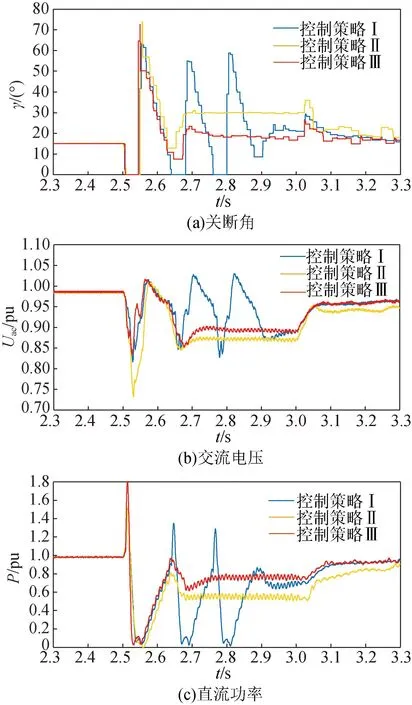
图10 单相不对称故障下系统动态响应Fig.10 System dynamic response under single-phase asymmetric fault
由图10仿真结果可知,在该不对称故障工况下,CIGRE原控制方式抵御后续换相失败能力较差,共发生3次换相失败,表现为关断角γ先后3次跌落至0°,直流功率在此期间持续大幅波动,相比之下本文所提改进电流偏差控制在首次换相失败后未发生后续换相失败,在不对称工况下同样可以在控制二次交互阶段通过维持电流偏差控制输出水平,提高系统关断角识别能力来避免后续换相失败发生。控制策略Ⅱ关断角同样仅一次降为0°,但本文所提改进型电流偏差控制策略在故障恢复期间直流功率及交流电压恢复水平整体优于控制策略Ⅱ,在系统故障恢复阶段,多传输约0.22 pu的直流功率,具有更出色的功率传输能力,有效缓解系统故障后送受端功率不平衡的问题。
4.2 后续换相失败免疫效果分析
为进一步验证本文所提改进电流偏差控制策略在对称及不对称故障和不同严重程度下后续换相失败免疫能力,在前文仿真实验基础上,改变接地电感Lf值模拟不同故障工况,故障严重程度量化指标定义为FL[18]:
(4)
式中:Pd为额定直流功率。
仿真验证FL选取范围为20%~50%,FL以1%为间隔,统计换相失败次数,仿真结果统计如图11所示。
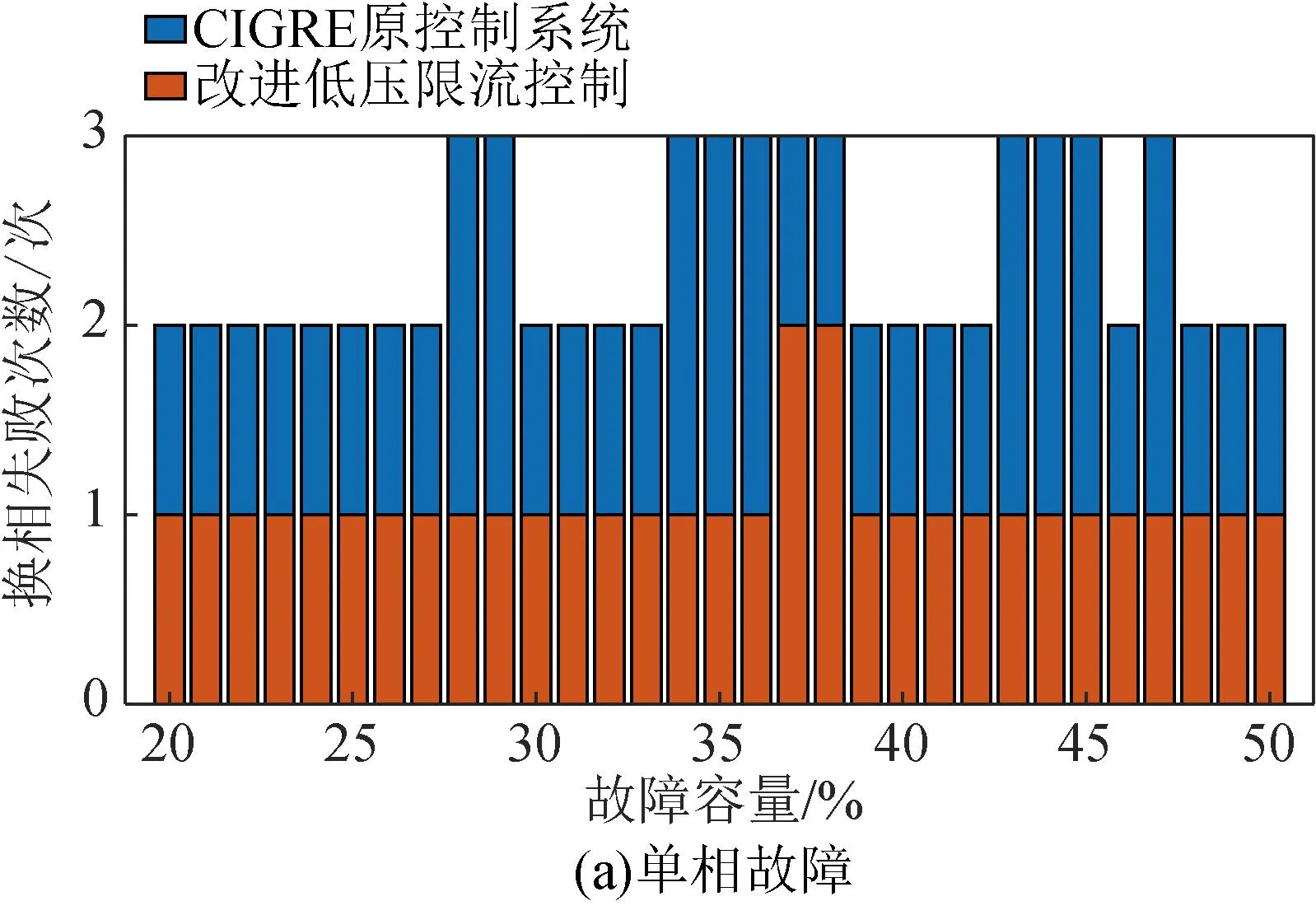
图11 后续换相失败免疫效果对比Fig.11 Immune effect comparison of subsequent commutation failure
由仿真结果可以看到,无论是对称工况还是不对称工况,不同严重程度故障下,对比CIGRE标准模型控制系统,本文所提改进型电流偏差控制策略发生换相失败的次数都有明显减少,说明该控制可以有效提升后续换相失败免疫能力。
5 结 论
本文通过分析故障后各时段换流器控制交互影响的机理,基于各阶段的动态轨迹,得到逆变侧控制器对换相失败恢复过程的影响规律,提出了改进型电流偏差控制策略,经过仿真验证,结论如下:
1)高压直流输电系统故障恢复过程中存在逆变侧控制器多次交互的现象,定关断角控制与定电流控制二次交互阶段,电流偏差控制大幅下跌削弱了系统关断角状态识别的准确度,极易引发后续换相失败。
2)所提改进电流偏差控制策略从逆变侧控制器交互机理出发,易于实现,有效抑制后续换相失败的同时,使系统能维持较高的功率传输水平。
猜你喜欢
学生天地(2020年6期)2020-08-25
数学年刊A辑(中文版)(2020年2期)2020-07-25
山东冶金(2019年5期)2019-11-16
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
人生十六七(2016年14期)2016-12-01
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
系统医学(2016年8期)2016-02-20
现代农业(2015年1期)2015-02-28