
考虑优化调度的微电网频率恢复分布式预测控制策略
2024-04-01 05:11钟鸣韩如磊王宇强
科学技术与工程 2024年8期
钟鸣, 韩如磊, 王宇强
(1.内蒙古电力科学研究院, 呼和浩特 010020; 2.内蒙古自治区电力系统智能化电网仿真企业重点实验室, 呼和浩特 010020)
微电网(microgrids,MG)是未来电力系统的一个重要组成部分,因为它们能够实现分布式能源(distributed energy, DER)的全面集成[1]。MG被定义为明确定义的电气边界内的一组相互连接的负荷和DER,作为电网的一个单一可控实体[2]。分布式微电网控制由于其可靠性强得到了广泛的应用,如何实现微电网分布式控制成为研究的重点领域。
针对分布式微电网系统,通信时延以及网络丢包等对系统稳定性会产生较大的影响。文献[3]将时延设计为电网模型的不确定性,提出了一种基于随机矩阵理论稳定性分析的鲁棒控制方法。文献[4]针对时延问题,引入深度神经网络对通信时延进行补偿,从而实现电网的稳定性控制。文献[5]将通信时延建模为系统扰动,然后设计了一种基于滑模观测器的鲁棒控制方法提升了对通信时延的鲁棒性。虽然上述方法降低了时延对系统控制的影响,没有实现功率调度的一致性。独立MG的控制任务分为3个控制级别,每个控制级别在不同的时间尺度上运行,然而,由于使用可再生能源和PE接口,MG具有低惯性,二级和三级控制之间的时间尺度分离可能会产生消极影响。
模型预测控制在MG控制中也发挥了重要作用。文献[6]中的非线性分布式模型预测控制(distributed model predictive control,DMPC)被描述为并网微电网的第三级能源管理系统,它依赖于外部负荷预测。文献[7]提出了一种用于频率和电压恢复的反馈线性化DMPC,将电感电容(inductance capacitance,LC)滤波器输出的电压和电流作为状态变量。文献[8]提出了一种用于电压恢复的DMPC控制器,而频率是通过(deep adaptive proportional integral,DAPI)控制器的变化和有限时间观测器来恢复的。文献[9]提出了一种基于乘法器算法的交流方向DMPC控制器,通过操纵电压敏感负载的电压来调节网络化MG系统中的频率。文献[10]提出并通过实验验证一种用于频率和电压恢复的DMPC,该DMPC使用下垂模型和功率传输模型来实现无功比例功率分配,其中功率共享是基于使用邻接矩阵对MG中每个发电机组的实际功率和无功功率贡献进行关联。然而上述方法仅考虑了快速频率恢复,未能实现高效的分布式微电网功率调度。
为了解决快速频率恢复和缓慢功率调度之间的时间尺度分离问题,提出一种考虑优化调度的微电网频率恢复分布式预测控制策略,在同一时间尺度上处理经济调度和频率恢复问题,并且通过模型预测控制实现最优调度。研究方法能够有效应用于电网控制调度,保证控制精度的同时极大降低经济成本。
1 相关理论
1.1 集中式功率调度
考虑三相平衡MG与一组P个分布式发电机组(distributed generator,DG),其中P是MG中DG的集合,P={1,2,…,p}。最优调度是在保证总负荷满足的前提下,确定可控制发电机组的最小成本调度。最优调度如式(1)所示。传统的集中式功率调度式(1)依赖于唯一的中央控制器,其故障会影响微电网的功率调度。因此,分布式控制是提高微电网可靠性和安全性的方案。
(1)
式(1)中:Pi为分布式发电机组i的实际功率贡献;Ci(Pi)为凸成本函数;PD为MG总负荷;实际功率贡献P={Pi:i∈P}。
假设强对偶成立,如Slater的约束条件成立,则问题可通过拉格朗日对偶表示,最优调度问题的拉格朗日函数为
(2)
式(2)中:拉格朗日乘数η与功率平衡约束相关。
式(3)中定义了问题的KKT(Karush-Kuhn-Tucker)平稳条件。从式(3)可以确定在最佳点,必须应用式(4)定义的增量成本(incremental cost,IC)函数。

(3)
η=∇Ci(Pi),i∈P
(4)
式中:∇为哈密尔顿算子。
第i台DG的发电成本函数如式(5)所示,第i台DG的IC由式(6)给出。
(5)
ηi(Pi)=2aiPi+bi
(6)
式中:ai、bi和ci为定义的成本参数。
η为拉格朗日乘数,功率调度问题重新分配所有DG的功率贡献,从而根据式(4)获得相同的η,其中η对应于与微电网最优调度问题的供需平衡方程[式(1)]相关联的双变量。因此,可以设计一种分布式方案,以确保ηi=ηj=η处于稳定状态,其中ηj为相邻DG的IC。此分布式方案本质上满足供需平衡。
1.2 分布式模型预测控制
模型预测控制(model predictive control,MPC)是一种多变量控制器,它采用过程模型,并允许在其公式中包含目标函数和约束条件,因此在微电网中得到了广泛的应用。MPC通过计算控制动作序列在每个采样时间解决优化问题,以实现问题目标;但是,仅对系统应用第一个控制动作,并且每次再下一个采样时间再次求解优化问题。尽管集中式MPC为问题提供全局解决方案,但它的主要缺点是需要大型通信结构,这可能会导致延迟通信故障并有可能危及整个系统的运行。由于计算负担随着优化变量数量的增加而呈指数增长,因此计算负担较高。DMPC在解决局部优化问题的基础上工作,考虑来自邻域的共享信息,控制器之间的信息交换使DMPC能够实现与集中式方法相同的作用,并且能够减少计算负担,另外在发生故障时更具鲁棒性。此外,DMPC简化了微电网的可伸缩性,并保留了即插即用的能力,因为当连接或断开DG时,不需要更改程序。
1.3 本文分布式控制方案
所提出的控制器既不依赖于MG的电气拓扑,也不依赖于相邻的物理测量,即只需要LC输出滤波器和电压观测器处的测量。因此,总线和配电线路的数量影响较小,为了避免对整个MG建模,LC输出滤波器和MG连接节点之间需要小耦合电感Li,如图1所示,这些电感可以替代虚拟阻抗控制器。

V为电压;Q为无功功率;L为电感;P为有功功率;Z为阻抗;ω为角速度;θ为相位角

通过给定一类非线性系统,即
(7)
式(7)中:x∈Rn×1为状态向量;u∈Rm×1为输入向量;满足F∈Rn×n和g∈Rn×1;状态向量可以划分为x=[xaxb]T,其中,xa∈Rna×1为可测量变量,xb∈Rnb×1为不可测量的变量。
式(7)可表示为

(8)
式(8)中:N、M、R、S为系统矩阵;ga、gb分别为可测量输入变量和不可测量输入变量。

(9)
式(9)中:ω0为标准频率;Vm为微电网的总电压。
将基尔霍夫电压定律应用于图1的电路,得到表示测量状态方程,可表示为
(10)

测量状态xa和估计状态xb,可得


(11)
观测器的结构可表示为
(12)

(13)
式(13)中:T为状态向量;ω1、ω2分别为两个角速度输出向量;gv为收益。
通过极点配置式(14)获得估计误差动态Ar,使观测器能够跟踪估计电压的相位,并且比二级控制器更快。最后,收益gv为-31 500,Br的表达式如式(15)所示。
(14)

(15)
每个DG的控制器方案如图1所示,每个DG配置为电压源逆变器(voltage source inverter,VSI)及其各自的LC输出滤波器,高亮显示两个控制层。第一级控制由角速度-有功功率(ω-P)、电压-无功功率(V-Q)降控制器、外部电压和内部电流控制器组成,这些控制器在直接正交框架上工作。

1.4 通信结构
为了在相邻DG之间共享信息,DMPC控制器使用全双工通信网络。该网络的使用考虑了延迟和连接问题。前者表示数据包到达目的地的时间间隔τij,后者反映DG之间的通信拓扑。延迟τij以采样周期表示,τij=τji。DGj的双向连接由非负加权邻接矩阵A的邻接项aij定义,由于通信是双向的,关联图是无向的,因此,aij=aji。
(16)
1.5 动态模型
由于所提出的控制器考虑了MG的实际情况,因此包含了控制构成MG的DG动态的模型。这些模型如式(17)所示,局部第i个DG的频率-实际功率[即ω(t)-P(t)]的下垂模型如式(18)所示,允许DG通过产生频率偏差来描述MG中的实际功率变化;此外,通过该模型,可以连接一级控制和二级控制。
为了确定从第i个DG传输MG的功率,必须确定相位角差。局部DG单元和MG之间通过耦合电感Li的相位角差δθi在式(18)中定义。
功率传输方程[式(19)]用于控制每个DG装置对MG的实际功率贡献。式(19)避免了使用导纳矩阵,因为这降低了DG单元的即插即用能力。
ωi(t)=ω0+Mpω,iPi(t)+ωs,i(t)
(17)

(18)
(19)
1.6 离散时间模型

ωi(k+1)=ωi(k)+Mpω,i[Pi(k+1)-Pi(k)]+Δωs,i(t)
(20)
(21)

(22)
2 分布式预测控制
2.1 问题描述
MPC使用系统的离散时间模型预测MG在预测范围Ny内的行为,并通过最小化成本函数的数值优化问题优化控制序列Nu。预测层和控制层的变量包含在向量Xi中,只有第一个控制动作应用于系统,最优控制问题在每个采样时间重复,并进行更新。在二级控制中实施MPC控制器的一个难点是定义一个优化问题,该问题具有较低的计算负担,并且可以在较短的采样周期内求解优化问题。
预测第i个DG在k+m阶跃下的响应,其中m∈Z+,在式(23)中扩展了式(17)的方程组。尽管线性化过程中产生的系数在每次采样时都会更新,但在优化过程中它们是恒定的。
ωi(k+m)=ωi(k+m-1)+Mpω,i[Pi(k+m)-Pi(k+m-1)]+Δωs,i(k+m-1)
(23)
(24)
(25)
MPC公式中包含一组操作约束,等式约束以确保控制器具有一定性能,不等式约束确保解决方案在每个DG的物理功率容量范围内。
式(26)表示局部平均频率,该平均值仅使用从其他DG传送的信息计算,该信息由邻接项aij确定,这两个参数分别提供了对通信故障和延迟影响的鲁棒性,包括终端约束[式(27)]以保证分布式预测方案收敛到预测视界Ny末端的跟踪值。
(26)
(27)
预测范围的IC如式(28)所示,该参数用于控制器的目标函数为
ηi(k+m)=2aiPi(k+m)+bi
(28)
式(28)中:ai为非负加权邻接矩阵A的邻接项。
最后,通过不等式约束式(29),第i个DG的实际功率贡献仅限于其物理容量。
Pimin(k)≤Pi(k+m)≤Pimax(k)
(29)
式(29)中:Pimin(k)、Pimax(k)分别为最小功率和最大功率。
2.2 成本函数
多目标成本函数如式(30)所示,由3个加权项组成,第一项表示平均频率恢复,仅使用从其他DG传输的信息计算平均频率恢复。第二项调整超调量和稳定时间。第三项通过局部DG和相邻DG之间对预测IC实现功率调度。因此,在目标函数内强制执行稳态条件ηi=ηj=η。

(30)

2.3 二次规划公式
由于所考虑的控制器具有凸成本函数和线性约束,因此使用二次规划(quadratic programming,QP)对其进行求解。成本函数[式(30)]及其各自的等式和不等式约束式(23)~式(29)通过矩阵/向量Hi、Ai、Bi、Aeq,i、Beq,i、Fi包含在式(31)中。QP问题的输出在式(32)中,其中预测变量集包含在Xp,i中,最优控制序列用XΔ,i表示。
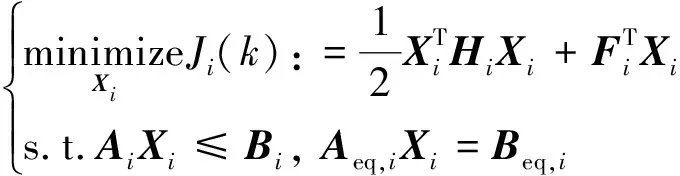
(31)
Xi={Xp,i,XΔ,i}
(32)

(33)
(34)
根据MPC原理,频率-功率下垂控制器只应用第一个预测控制动作XΔ,i,然后使用更新的测量值/估计值在每个采样时间重复优化。为了减少通信网络上的通信量,式(35)的Yi仅可以共享预测结果。
(35)
为了计算QP问题[式(34)],使用QPKWIK算法[12]。该求解器能够生成C++代码,以便在实验装置上运行。算法1中描述了解决DMPC方案的方法,具体步骤如下。
算法1 用于DGi的DMPC解决方案
收到的信息:Yij,∀j={1,2,…,p}
输出:Xi,Δωs,i(k)
初始化:
1:计算Hi、Ai、Bi、Aeq,i、Beq,i、Fi的矩阵/向量系数
2:每k个步长进行一次
3:根据接收到的信息计算邻接项aij。
4:根据接收到的信息,从式(9)和式(12)中计算频率和增量成本之和。
6:使用QPKWIK算法解决QP问题。
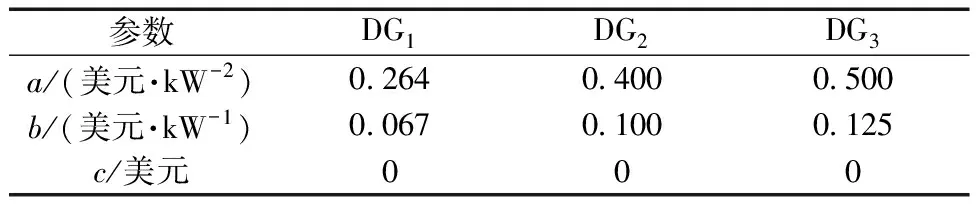
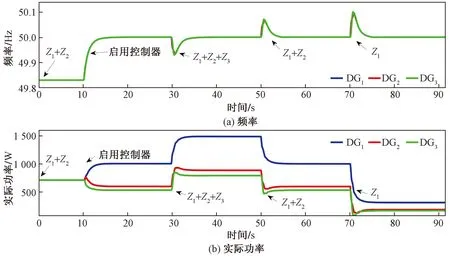
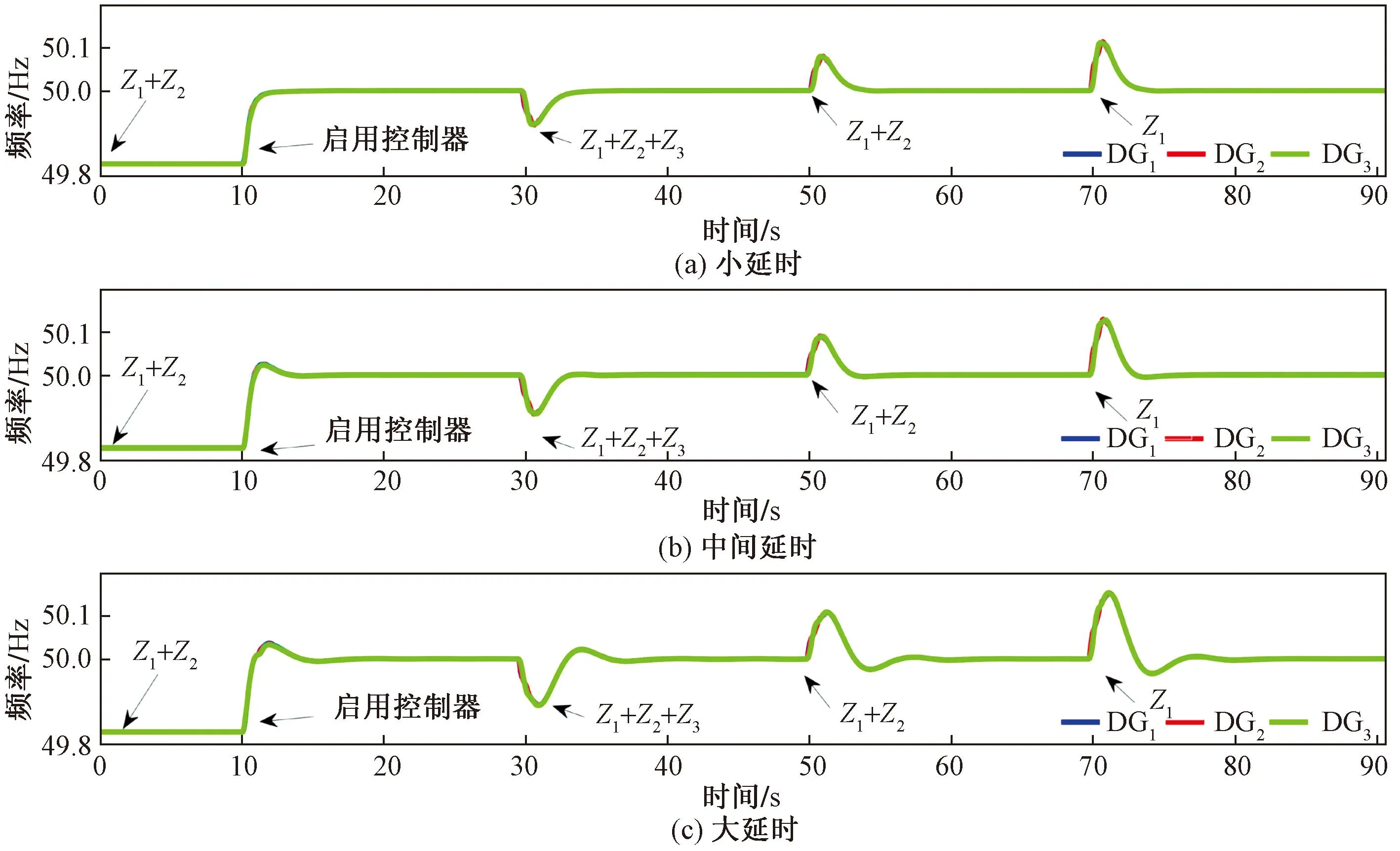
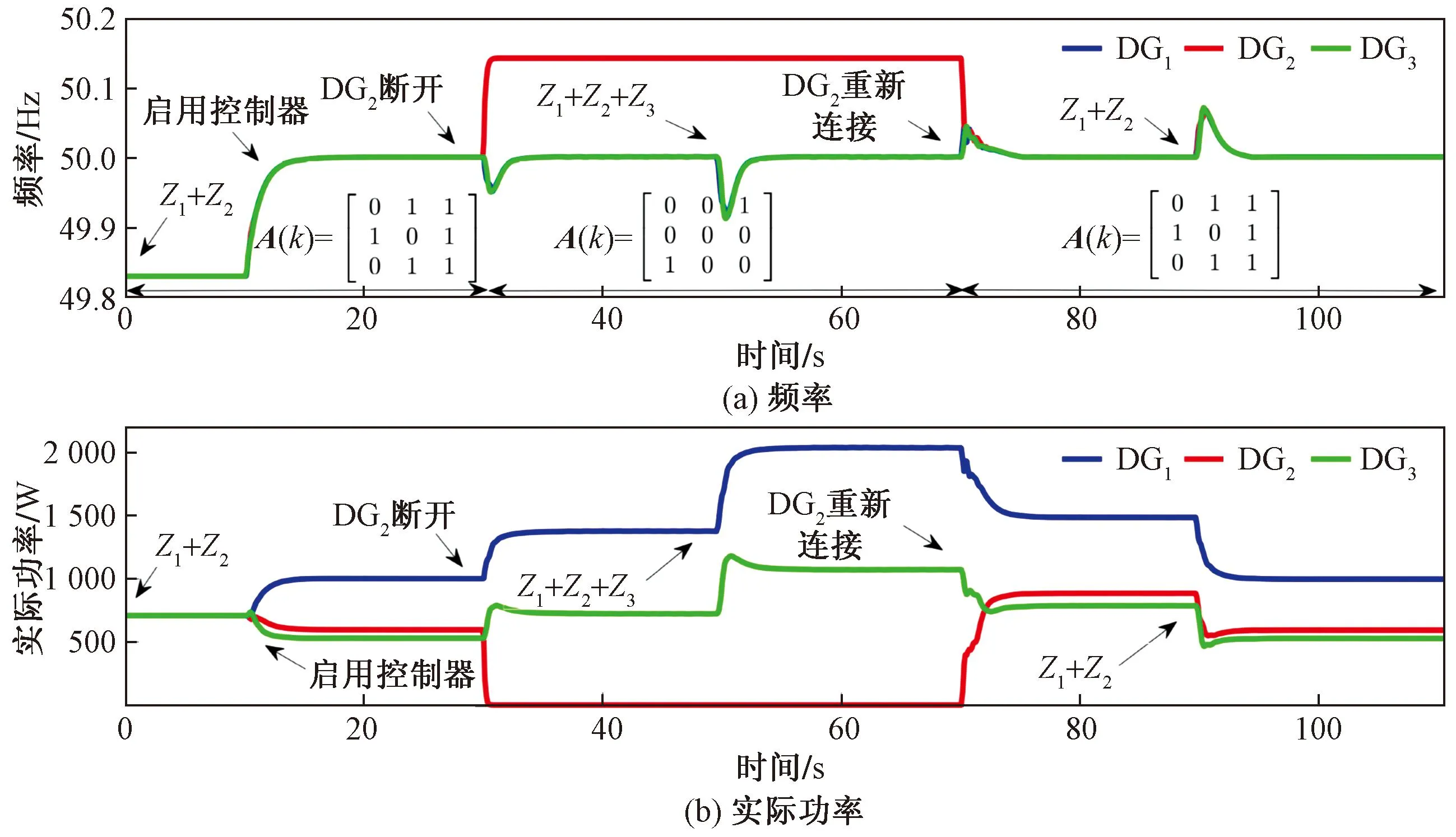
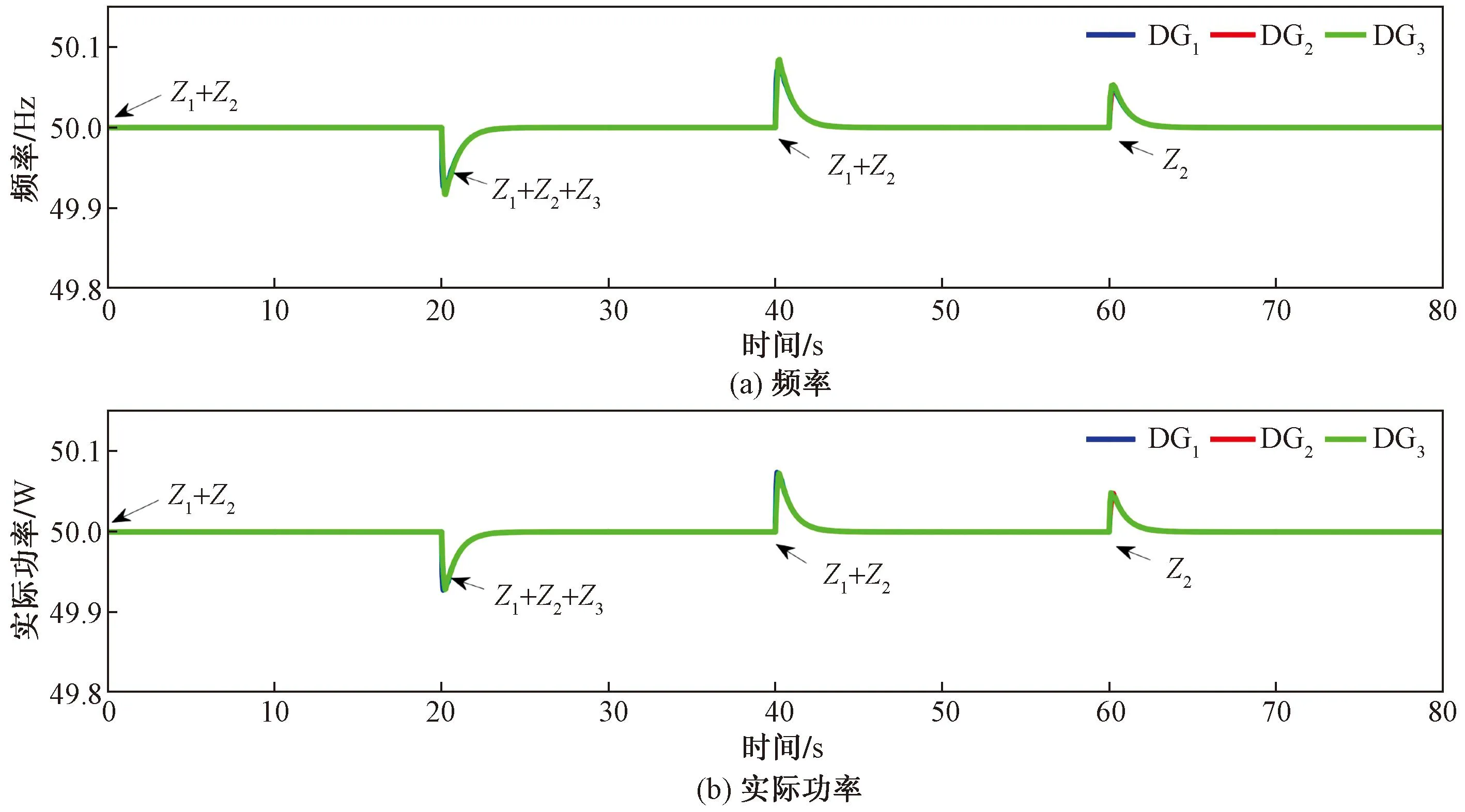
7:如果Xi是可行的,那么t 8:从Xi中提取Δωs,i(k)。 9:否则 10:Δωs,i(k)=0。 11:结束假设 12:如果可行,更新控制器输出并向相邻DG发送Yi 13:结束 使用图2所示的实验MG配置评估DMPC控制策略的性能,其中相关变量均可在正文中找到相应解释。这个实验MG是在MG控制实验室中建造的,包括3个DG单元,由PM15F120(DG 1和DG2)和PM5F60(DG3)三相©模拟,如图2所示。每个DG单元由实时目标(RTT)计算机控制,并且运行DMPC控制算法。最小估计延迟对应于二级采样时间的一个采样周期,表1和表2分别给出下垂参数和电气参数。 表1 功率容量和下垂斜率Table 1 Power capacity and sag slope 表2 MG参数Table 2 MG parameters δθ为相位角差;V为电压;Q为无功功率;L为电感;P为有功功率;Z为阻抗;ω为角速度;θ为相位角;DG(distributed generator)为分布式发电机组;MG(micro-grid)为微电网;RTT(round trip time)为实时目标模块 表3给出了DMPC设计参数和权重系数,选择所有设计参数的目的是减少总体计算负担,这是因为计算复杂度随着采样时间以及预测和控制范围的增加而大大增加,当选择采样时间时,考虑到频率开环上升时间(Tr=0.7 s)为Tsec=0.05 s,预测和控制范围选5个样本,从而使得通信网络上的通信量减少。通过启发式调整权重因子,寻找控制目标之间的权衡。表4[13]列出了文献[13]中各DG机组的发电成本。 表3 控制器参数和权重Table 3 Controller parameters and weights 表4 DG成本参数Table 4 DG Cost parameters 使用实验MG在4种情景下对控制器进行了测试,第1个情景展示了MG发生负载变化时DMPC的性能,第2个情景显示了在通信网络上存在延迟效应时MG的行为,第3个情景显示了通信网络故障的影响。最后一个情景验证即插即用功能,其中DG2从MG断开并重新连接。 当存在多个负载影响时,在整个测试过程中,邻接矩阵不变。 (36) 测试从启用一级控制(内部环路和下垂控制)和在不同节点连接两个负载Z1和Z2开始,观察在没有DMPC控制器的情况下,DG单元平均共享实际功率,如图3所示,频率偏离其标称值,在t=10 s时,启用提出控制器,因此频率恢复到其标称值;真实功率被重新分配。一旦启用控制器,将根据DG的运行成本重新分配实际功率。在30 s时,MG承受其总负载(Z3已连接)。最后,分别在t=50和t=70时断开负载Z3和Z2。如图3所示,在所有负载扰动期间,控制器呈现平滑响应,没有大的超调,两个目标的稳定时间均低于3 s。 图3 DG单元的频率与实际功率 如图4所示,所设计的DMPC控制器不会影响DAPI控制器的电压恢复和归一化无功功率的共享性能。电压调节比无功功率分配更好。 图4 DMPC控制响应 在存在延迟的情况下,频率恢复是受影响最大的变量。图5分别说明了小延时(τij=0.25 s)、中间延时(τij=0.5 s)和大延时(τij=1 s)情况下各DG的频率。可以发现,延迟越大,超调量和稳定时间越大。然而,在提出控制器作用下,这两个参数仍然很小,即使在τij=1 s的情况下,超调量可以忽略不计(小于0.3%),且稳定时间低于10 s。 图5 延迟下的频率恢复 相同3个时间延迟的实际功率如图6所示。据观察,下降时间几乎不受影响;即使在最坏的情况下(τij=1 s),下降时间也小于5 s。随着时间延迟的增加,超调量略有增加,这在激活控制器时最为明显。尽管如此,仍然可以忽略不计。根据这些结果,可以确定DMPC对预测范围以上的通信延迟具有鲁棒性,这是因为MPC使用滚动地平线特性,该特性使用来自相邻DG的历史信息也可确定适当的控制序列,提升相应的抗干扰能力。 图6 实际功率曲线 为了分析控制器在通信链路故障时的性能,进行了以下测试。测试从两个连接在不同节点(Z1和Z2)的负载开始。在t=10 s时,启用控制器。DG1和DG2之间在t=30 s时强制发生通信故障,因此修改邻接矩阵,如式(19)所示,并且控制算法通过仅使用接收到的信息计算式(9)和式(12)来自动识别故障,Z3在t=50 s时连接,在t=70 s时断开,最后,在t=90 s时恢复通信链路。 结果如图7所示。据观察,控制器性能并未受损,控制目标得以实现,因此,该控制策略对通信故障具有鲁棒性。然而,瞬态响应是不同的,其稳定时间增加到近10 s。这是因为式(37)的通信矩阵A是不完整的,并且控制目标与来自相邻DG的已知信息直接相关。 (37) 图7 控制响应结果 当特定DG发生意外故障时,该测试显示控制器的响应性能。测试开始时,两个负载在t=0s(Z1和Z2)处连接,控制器启用,在t=10 s时,邻接矩阵由式(18)表示。在t=30 s时,停止使用DG2,即DG2与电气系统和通信网络断开。因此,如图8(a)所示,修改邻接矩阵,MG在DG1和DG3连接的情况下继续运行。接下来,在t=50 s时,连接总负载。在t=70 s时,同步程序完成后,DG2重新连接到MG。最后,断开Z3。 图8 情景四频率与实际功率曲线 尽管DG2已从MG断开,但它并未关闭。只有其辅助控制被禁用,但其一级控制继续运行。当DG2断开或重新连接时,邻接矩阵将更新。因此,剩余的DG机组只与运行机组一致。 频率恢复如图8所示,在整个试验过程中,运行DG可充分恢复频率,无超调或长的稳定时间。类似地,当DG2断开时,尽管两个DG单元都增加了它们的功率,但DG1承担了大部分负载,并且未超过其最大功率容量。因此,所设计的控制器具有即插即用功能,并且始终满足DG的物理功率容量。 使用仿真研究对本文方法和文献[14]的工作进行了比较。文献[14]的目标是恢复频率和电压,同时确保比例功率共享。因此,它在不考虑发电成本的情况下共享实际电力。 这两种控制策略都针对负载变化情景进行了测试,它们的邻接矩阵如式(38)所示。对于这两个控制器,测试描述如下:打开控制器,连接Z1和Z2,测试开始。然后在t=20 s和t=40 s时,分别连接和断开Z3。最后,在t=60 s时,断开Z1。两个方案的实际功率结果分别如图9所示。相反,在评估式(6)中DG的实际功率时获得的运行成本与表4的系数之间的比较如图9所示。可以观察到,本文方案在整个试验期间具有较低的运行成本。此外,两种方法的频率调节响应如图10所示,结果显示两种方法具有非常相似的响应,这是因为这两种策略都寻求频率调节目标,并将P-ω下垂模型作为约束条件。 图9 两个方案的实际功率曲线 图10 两种方法的频率调节响应 两种技术的完整测试、节约和优化时间的运行成本如表5所示。成本节约的表达式为 (38) 表5 控制器的主要区别Table 5 Main differences of controllers 式(38)中:C1为本文方法的操作成本;C2为文献[14]的操作成本。 为了解决快速频率恢复和缓慢功率调度之间的时间尺度分离问题,提出一种考虑优化调度的微电网频率恢复分布式预测控制策略。在4种测试情景下对控制器的动态性能进行实验评估,得出如下结论。 (1)该控制器在4种不同的情形下依旧能够保证良好的控制性能,证明该方法控制器能够有效处理通信链路问题和DG的连接/断开,对于通信链路故障具有较强的鲁棒性。 (2)提出的方法对负载变化和通信问题具有较强的鲁棒性,并且保证了频率快速回复。 (3)提出方法具有更低的操作成本,另外优化时间也较短,且不需要额外传感器,简化了应用条件。3 实验装置和结果
3.1 实验性MG配置
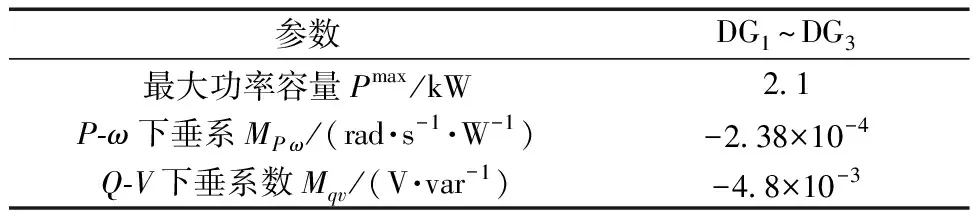
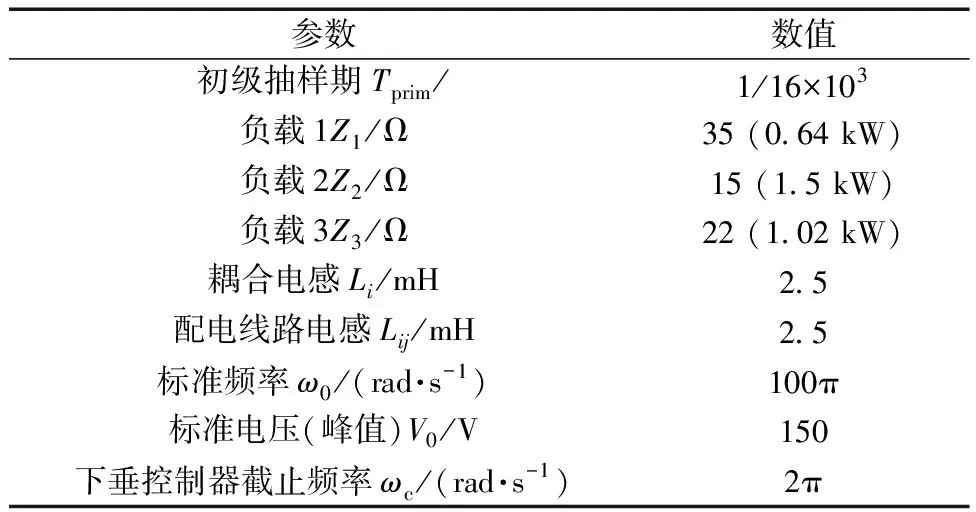

3.2 DMPC设计参数和测试情景

3.3 情景一:负荷变化

3.4 情景二:通信延迟


3.5 情景三:通信链路故障

3.6 情景四:即插即用
3.7 性能比较



4 结论
猜你喜欢
铁道通信信号(2020年10期)2020-02-07
成都信息工程大学学报(2019年3期)2019-09-25
三门峡职业技术学院学报(2019年1期)2019-06-27
能源(2017年10期)2017-12-20
能源(2017年5期)2017-07-06
雷达与对抗(2015年3期)2015-12-09
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年12期)2014-02-28
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28
