
基于STM32 单片机的光伏双轴跟踪系统设计
2024-04-16 03:24房良睿王磊范丽君黄永祥魏楠
电子制作 2024年6期
房良睿,王磊,范丽君,黄永祥,魏楠
(神华工程技术有限公司安徽分公司,安徽合肥,230000)
0 引言
能源是现代社会存在与发展的重要基础。由于世界经济水平的不断增长,能源消耗也在不停地增加,从而导致了全球能源危机的出现[1]。
根据相关数据表明,到2025 年,我国的能源需求总量可能会达到32 亿吨煤量,几乎是2000 年的两倍,并且我国目前的主要能源煤炭、石油和天然气的储备量仅占世界平均水平的50%、40%和70%左右[2~3]。为了应对有可能发生的能源危机,我国正在大力发展新能源有关的产业。而新能源中,太阳能又是不可或缺的一部分。太阳能是一种非常干净环保的新能源,在转化为可利用的其他形式能量时,不会产生任何有害气体或固体废物[4]并且太阳能总能量排名为当今人类所能开发利用的可再生能源之首[5]。
在光伏系统中,双轴光伏跟踪系统相较于固定式光伏系统可提高20%的发电量[6]。
为了提高光伏系统的发电量,本文设计了一个智能化、控制简单的双轴光伏跟踪系统,该系统可以通过传感器感受太阳位置,从而控制光伏电厂的朝向。
1 系统设计
基于STM32 单片机的光伏双轴跟踪系统设计包括两个部分,一部分是硬件部分,通过寻光传感器采集太阳朝向,当太阳位置与光伏板朝向有偏差时,通过步进电机控制机械臂云台,改变光伏板朝向,以实现控制光伏板朝向太阳方向。
图1 展示了该系统的架构图,该系统可以控制云台朝向,将光伏板实时朝向最佳发电角。
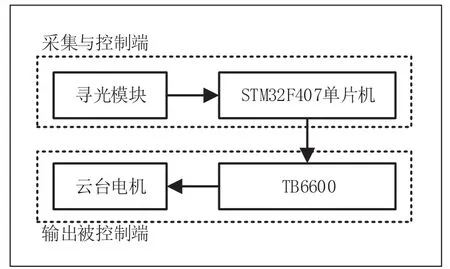
图1 系统的架构图
2 硬件系统设计
■2.1 寻光模块电路设计
本系统采用2 对HD-36 寻光模块对太阳方位信号进行采集。将2 对传感器分别安装在光伏板下方两侧,以及云台两侧,安装时需要注意摆放位置,如图2 所示。

图2 HD-36 摆放位置
光伏板如果与太阳方向接近,4 个传感器均会被遮挡。否则,会有一侧受到太阳的光照,另一侧受不到光照。将传感器输出信号通过自带的模块输入至单片机。每对光寻迹模块电路图如图3 所示。

图3 HD-36 电路图
该模块输入电压为5V,故将模块的VCC 接入5V 电压,GND 与0V 相连。M1 与M2 为模块的输出信号,输出信号为0V/5V 的电压信号,信号与STM32 相连,将输出信号传入STM32 主控芯片。单片机通过读取这2 个引脚的状态来判断太阳的相对位置。
■2.2 双自由度机械臂云台
双自由度可以通过机械臂的2 个步进电机控制光伏板朝向,水平方向上步进电机可以控制上方机械臂在水平方向上朝向,使得上方机械臂转动平面在水平面上360 度转动,通过单片机控制机械臂下层步进电机,使上层转动平面与太阳处于同一平面。再通过转动上层固定的电机可以控制光伏板在垂直方向上朝向,通过控制步进电机使光伏板朝向与太阳相近的位置。通过2 台42 步进电机,控制光伏板,使其具有最佳倾角。
■2.3 步进电机
步进电机采用2 台42 步进电机,分别通过1 个TB6600驱动电机,根据电机参数,一个脉冲转动1.8 度,转动一圈为360 度。一圈为200 个脉冲,本设计不做细分,故按照驱动参数,将拨码开关的S1/S2/S3 分别拨至ON/ON/OFF,通过步进电机的电流参数查TB6600,步进电机电流为1.5A。将额定电流与峰值电流均设置为大于1.5A 的最接近挡位。将电机的驱动额定电流设置为1.5A,峰值电流设置为1.7A。按照驱动参数,将拨码开关的S4/S5/S6 分别拨至ON/ON/OFF。故将电机驱动的S1~S6 设置为ON/ON/OFF/ON/ON/OFF。
将TB6600 的VCC 接至9~42V 直流电源正极,本设计中接至24V 电源正极,GND 接地。A+/A-/B+/B-分别接步进电机的A+/A-/B+/B-线,接线方式一一对应。本设计信号部分采用共阴极接线,PUL-/DIR-/ENA-接地。PUL+/DIR+/ENA+接单片机引脚。PUL 为步进电机的脉冲信号,每脉冲一次步进电机转动1.8°。DIR 为步进电机的方向信号,控制步进电机转动方向。TB6600 电路如图4 所示。

图4 TB6600 电路
■2.4 按键
按键部分使用微动开关,本设计中GPIO 使用浮空输入,不使用芯片上拉电阻。故将按键两端一端接上拉电阻和单片机IO 口,一端接地。当按键未被按下时,GPIO 口与地断开,IO 口输入通过上拉电阻为高电平。当按键按下时,IO 口直接与GND 相连,IO 口被拉到低电平。按键电路如图5 所示。
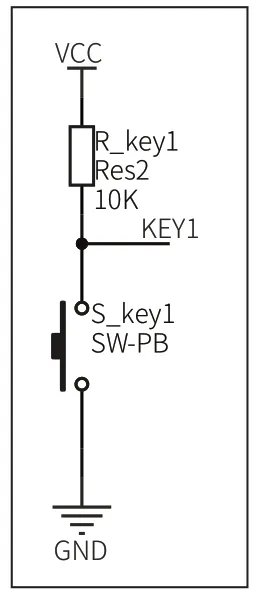
图5 按键电路
■2.5 硬件系统
硬件部分主要由以上各个模块构成,通过软件绘制电路原理图,将各个模块连接到单片机芯片的相应引脚上。
除以上部分外,为使单片机更好地工作,还需要设计相应的电路。如单片机的复位、晶振、电源等。通过软件绘制原理图并生成PCB 图后,打板焊接成最终的硬件。
单片机的复位电路类似于电脑的重启按钮,在刚上电时需要给STM32 一个低电平,再将其拉高。复位电路的设计方法是通过RC 串联的方式,将10kΩ 的电阻与0.1μF 的电容串联,其中0.1μF 的一端接地,另一端接电阻。10kΩ 的电阻一端接VCC,另一端接电容,将电容与电阻连接的部分与单片机的复位引脚连接。在上电时,由于RC 电路的特性可以使复位引脚处于低电平状态,使单片机复位。完成复位后,随着电容逐渐充满电,复位引脚的电位逐渐被拉高,单片机不再处于复位状态。在电容处并联一个按键,使得单片机在工作时如果需要手动复位,可以通过按下复位按键使电容器短路形成一个低电平,通过按键形成的长时间的低电平也可以使单片机复位,以实现在需要单片机重启时,通过按键复位功能使单片机复位。
单片机在运行时需要一个时钟,这个时钟就是晶振电路。STM32 分为内部时钟和外部时钟,本次设计的2 个外部时钟使用的是无源晶振电路。将单片机连接晶振的引脚连接至晶振的两端,两端通过电容连接至GND,构成一个时钟电路。外部时钟的2 个晶振的频率分别为8MHz 和32.768kHz。8MHz 为高速外部时钟(HSE),32.768kHz 为低速外部时钟(LSE)。单片机内部还有PLL(锁相环倍频输出),可以对时钟部分进行分频倍频。在单片机初始化时可以对时钟进行操作,调整其时钟的参数,使其以一定的时钟频率工作。
电源部分分为24V、5V、3.3V 这3 个电压的电源设计,24V 采用成套的24V 电源,通过成套的24V 电源将交流220V 电压转换为直流24V 电压,给系统提供稳定的24V 直流输入,并作为5V 和3.3V 的电源直流输入。
通过LM2596-5 将24V 电压降压至5V。LM2596 是一款常用的直流转直流的降压芯片。LM2596 开关电压调节器是降压型电源管理单片集成电路,能够输出最大3A 的驱动电流,同时具有很好的线性和负载调节特性。将电源降至5V 供HD-36 模块使用。
通过LM1117-3.3 将电压降为3.3V,供主控使用。LM1117-3.3 共3 个引脚,中间的2 引脚为GND,是输入与输出的公共端。2 端各并联一个电容器滤波,分别接于Vin与GND 之间、Vout 与GND 之间,以滤除高次谐波。Vin输入5V 电压,取自LM2596-5 输出;Vout 输出3.3V 电压,供单片机使用。
3 软件系统设计
■3.1 主程序流程设计
STM32 单片机分别使用2 个GPIO 连接信号线连接1对HD-36 寻光模块的M1/M2。利用STM32 采集到开关量的输出,通过采集到的开关信号在STM32 内部进行运算处理,通过判断采集到的信号判断当前光伏板朝向,并控制云台转动至适合的区域。
当云台两侧传感器检测到太阳方向与上方机械臂转轴方向不垂直时,可以通过控制云台下侧电机,将云台转动至太阳方向与上方机械臂转轴方向垂直的方向。当光伏板两侧传感器检测到太阳方向与光伏板法线不平行时,可以通过控制光伏板下方电机,将云台转动至太阳方向与光伏板法线方向平行的方向。
■3.2 子程序流程设计
3.2.1 寻光子程序设计
每对寻光模块有4 个接口,分别接5V 电源VCC/GND,以及M1/M2。单片机的IO 口接模块的M1/M2,首先开启时钟并初始化STM32 端口为浮空输入,并循环读取IO 口的输入状态。
当云台两侧传感器输入状态为M1 高电平且M2 低电平时,控制电机正转;当输入状态为M1低电平且M2高电平时,控制电机反转。
当光伏板两侧传感器输入状态为M1 高电平且M2 低电平时,控制电机正转;当输入状态为M1 低电平且M2 高电平时,控制电机反转。
3.2.2 步进电机子程序设计
PUL 为步进电机的脉冲信号,每脉冲一次步进电机转动1.8°,初始化时设置为复用推挽输出模式,开启并复用电动机相应定时器。DIR 为正转反转信号,ENA 为使能信号需要初始化为推挽输出模式。通过这几个输出控制电动机转动。
3.2.3 按键控制子程序设计
本设计共设计了6 个输入按键,通过6 个可以手动控制,分别为自动/手动/电机1 正转/电机1 反转/电机2 正转/电机2 反转。
由于按键电路上设计了上拉电阻,故初始化时设置为浮空输入。其中自动/手动接单片机中断。当按下手动按键后单片机进入外部中断函数,延时消抖并停止步进电机PWM输出,将自动手动标志位置为手动。通过标志位将主程序退出自动模式的循环进入手动模式,当进入手动模式后,通过电机的4 个按键控制电机的正转反转。当按下自动按键后单片机停止步进电机PWM 输出,并将自动手动标志位置为自动。通过标志位将主程序退出手动模式的循环进入自动模式,当进入自动模式后,通过HD-36 寻光模块控制电机正反转。程序逻辑图如图6 所示。

图6 程序逻辑图
4 结论
本文采用STM32 单片机、寻光模块、双自由度机械臂云台设计一个光伏双轴跟踪系统,该系统以STM32 单片机为控制核心,使用HD-36 寻光模块采集太阳的相对位置,TB6600 驱动步进电机控制光伏板朝向,实现了双轴系统自动跟踪光源,具有重要的应用价值。
猜你喜欢
现代装饰(2022年6期)2022-12-17
现代装饰(2022年6期)2022-12-17
辽河(2022年1期)2022-02-14
辽河(2022年1期)2022-02-14
轨道交通装备与技术(2021年5期)2021-11-19
摄影之友(影像视觉)(2020年2期)2021-01-14
电子制作(2019年23期)2019-02-23
汽车维修技师(2018年7期)2018-12-07
读者·校园版(2018年24期)2018-12-04
核技术(2016年3期)2016-04-19
