
基于三轴加速度计对阈值跌倒识别算法的优化
2024-04-16 03:24陈子萱林永熠卢韵洁郭雪妮常相辉
电子制作 2024年6期
陈子萱,林永熠,卢韵洁,郭雪妮,常相辉
(西南交通大学 物理科学与技术学院,四川成都,610031)
0 引言
近年来,我国人口老龄化趋势不断增速,预计2030 年空巢老人家庭比例有可能达到 90%以上[2]。目前跌倒是老年人伤残、失能和死亡的主要原因,且是65 岁以上老人死亡的首因[3]。为保障老年群体,特别是缺少监护的独居老人的安全,做出性能好、适用性强的的跌倒防护装置成为迫切需求,而防护装置的重点在于如何识别跌倒,做到“跌落前识别,跌倒时防护”。传统的跌倒识别[4]是一种跌倒后检测方法,旨在自动提醒监护人。虽然它可以在跌倒后立即报警,提醒监护人,从而减少伤者由于缺乏监护耽误送往医院的时间。但是它不能防止或减轻摔跌对人造成的伤害。新型的防跌倒识别系统主要依靠信号检测与处理、信号特征提取、数据传输等基本功能模块,实现对动作行为进行监测,并可在发生跌倒碰撞前预先识别,通过快速充气形成安全气囊,对老人尾椎、髋关节和后脑等关键部位进行防护,减小摔跌时的碰撞冲击[5]。
检测老人跌倒状态的方法有很多,根据不同信号采集方法可以主要分为三类[1]:基于视频监控的跌倒检测、基于声学的跌倒检测和基于传感器的跌倒检测。基于视频监控的跌倒检测是采用摄像头持续对于特定区域范围内的目标进行视频拍摄,提取视频中图像信息,再通过图像处理,判断视频中人物是否跌倒[5]。基于声学的跌倒检测通常分析跌倒时,人体碰撞产生的低频信号以及人体反射超声波的高频信号。基于传感器的跌倒检测[6]是一种装载有传感器可穿戴设备,可以实时监测老年群体的行为活动,获取判定标准的特征值,通过算法和判断模型进行处理,从而确定老年人是否跌倒以及确切的跌倒姿势的设备。
利用视频图像、超声波或者其他声学特征来识别人体动作的传统技术方法受制于设备数量和性能、以及识别场景的固定性。随着微电子技术的发展,体积小、能耗低的传感器件已较为普遍地出现在市面上。目前的可穿戴的设备由传感器、微控制单元和无线通信模块集成而成,可以识别人体行为方式,判断摔跌情况,可以在跌倒时反馈警报,从而帮助老年群体得到及时救助[7]。该种方法不需要特定场景下的固定仪器设备,不受人运动环境的限制,只需随身佩戴,所以应用前景更为广阔。针对可穿戴设备在生活中的应用,目前有效的判断方法是通过给传感器模块合理设置阈值,以及识别运动的模型来判断老年人是否跌倒以及跌倒方式。为老年人佩戴一个带有加速度获取模块的设备,长时间伴随记录他们的日常活动数据。当老人发生摔跌,加速度将在一定时间内发生突变,产生峰值。所以可以通过设置一个合理的阈值。如果加速度峰值超过设定的阈值,通过其他辅助判据可以确定老年人是否跌倒[8]。
综上所述,本文基于三轴加速度计传感器的跌倒检测,采用事后跌倒识别研究了跌倒识别算法。事后跌倒识别又分为未撞击阶段识别和撞击后识别,未撞击阶段识别通过提取未撞击前加速度、速度、倾角等特征量,后建立数学模型等进行跌倒识别[9]。考虑到硬件内存、算力的限制、无线传输的网络延迟、传感器的灵敏度和信号提取速度等限制,本文利用CH340 加速度计提取跌倒以及行为前后的加速度值等特征量,通过统计判断识别阈值,制定识别算法,后采用利用单片机等硬件资源自主研发的传感器装置进行识别,通过跌倒实验验证了该算法的实时性和有效性。
1 人体模型建立
跌倒过程中人体各部位都有相应动作,且并非所有动作对跌倒识别都是有效的,若考虑所有动作则人体模型过于复杂。经过研究证明,围绕人体腰部建立模型是最为有效的。腰部的倾斜动作反映了人体躯干的运动,且腰部与人体重心位置较为靠近,故跌倒实验模型以腰部为轴建立XYZ坐标系。如图1 所示,人体腰部为原点,人体上下为X 轴垂直于地面,人体左右为Y 轴,人体前后为Z 轴,平面YOZ 平行于地面。

图1 在腰部建立直角坐标系
2 跌倒实验及数据收集
正常生活中我们将人体行为活动分成两类:正常行为活动和跌倒。正常行为活动包含:站立、坐下、蹲下、躺下、起立、常速行走、奔跑、上下楼梯。跌倒包括向前跌倒、向后跌倒和侧面跌倒。跌倒区别于正常行为活动有以下4 个特征:失重、朝向变化、撞击和静止。跌倒过程可分为3个阶段[10]:①失去平衡,即人体出现向下倾斜并伴有跌倒趋势;②失重,就是跌倒过程中人体开始向下倾斜但是还没有接触到地面的阶段;③跌倒触地碰撞,就是人体跌倒在地面,与地面碰撞,速度突变然后恢复平衡的阶段。在跌倒失衡阶段,由于过程时间短暂,人体仅仅有跌倒的趋势,即这个阶段没有方便定义和识别的可用于跌倒分析的特征量。所以,在这个阶段不适合进行人体跌倒的分析。在跌倒失重阶段,人体的加速度和姿态倾斜角变化迅速。这个阶段的时间比较短暂,但是具有失重和朝向变化这两个物理特征。因此,在这个阶段做跌倒预测是非常合适的。跌倒触地碰撞阶段,虽然也有可用于识别判断跌倒的特征量,如速度,加速度的突变,倾斜角变化量为0 等。但是由于已经跌倒造成伤害,跌倒后再进行判断没有太大应用价值。
我们将CH340 加速度传感器固定于4 位实验人员(P1,P2, P3, P4)腰部,分别让其进行正常日常行为活动和跌倒。一组数据包含:站立、常速跑步、上楼梯、下楼梯、常速步行、蹲起、跳跃、坐起这8 项日常行为活动以及向前跌倒和向后跌倒这两项跌倒方式。4 位实验人员分别进行重复10 组实验并收集数据。
3 数据分析及阈值确定
本文主要计算合加速度,倾角变化,SMA 等特征量,通过对真人实验数据分析总结,并找到跌倒行为与其他行为在这些特征量上的区别以及各自特征,以便用于构建跌倒识别算法。
■3.1 合加速度
通过对多个跌倒运动数据的分析,跌倒行为的瞬时加速度会发生剧烈变化,在一段时间出现远远高于日常缓慢行为加速度的峰值,加速度公式用下式表示:
式中A 为三轴加速度的合加速度。ax,ay,az分别为加速度计对同一个数据点收集到的三轴的加速度数据。
日常行为中的合加速度模拟如图2 所示,横坐标为数据点,纵坐标为加速度。

图2 人体各行为动作合加速度
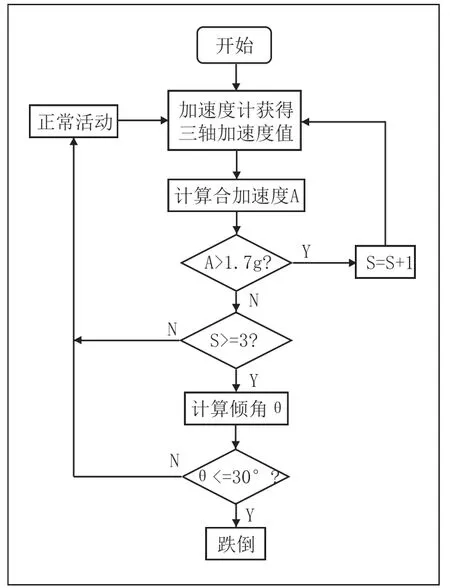
图3 跌倒检测算法流程图
根据图2 可得各种行为活动合加速度峰值,对每组数据求平均值,整理如表1 所示。

表1 每组各项行为活动平均合加速度峰值
如表1 所示,跑步的合加速度峰值都在2.0g 以上,跳跃的合加速度峰值都在3.0g 以上,最大可以达到3.5g。其他的缓慢活动中不同身高体型的人的合加速度值差异不大,比如静止站立的时候,此时加速度都约为一个重力加速度。实验人员均为18~22 岁青年,在跑步、行走、跳跃等动作可能与实际情况下的老年群体有所差别。为了保证能检测到所有跌倒或疑似跌倒的动作,同时又能区分一些很明显的非跌倒动作,我们设定合加速度的阈值为1.7g,通过这个阈值,就可以排除一些非剧烈行为活动,同时这个阈值比跌倒动作产生最大合加速度值要小,即当跌倒或疑似跌倒动作发生时都可以进入后面的检测判断步骤,减少漏判的情况。
■3.2 人体倾角
在数据收集中,定义数据AngleX, AngleY, AngleZ 为与初始(笔直站立)调零时刻x, y,z 方向对应的夹角。跌倒 时AngleX ≥60 °, 即 对 于 一 般 情 况AngleXi-AngleX0≥60 °,其中AngleX0是初始时刻的角度,AngleXi为此后任意时刻角度。若需时刻对AngleX0和AngleXi进行保存并计算,对设备存储读取数据要求较高。构造地面坐标系OX0Y0Z0,和固定于人体的动坐标系OX1Y1Z1有:
■3.3 运动剧烈程度
定义加速度幅度区域SMA(Signal Magnitude Area)其中T 是归一化时间:
SMA 即为加速度-时间图像下的平均面积。该面积大小可以反映一段时间活动的剧烈程度,SMA 越大运动程度越剧烈。对老年群体而言,平时日常行为都是缓慢运动为主,偶有较大SMA,而跌倒在瞬时段也属于一种剧烈运动,SMA 较大。因此,SMA 也可作为一个判定标准。
4 跌倒检测算法及检测结果
跌倒检测算法是设备识别跌倒的根本,追求低误判、低漏判的检测算法尤为重要。正如本文第3 节所讲,我们可以通过SMA,人体倾角,合加速度等多个判定标准去衡量。但是考虑到跌倒识别装置为人体可穿戴装置,其体积小质量轻,所拥有的计算能力可能较弱,不适合做大量复杂运算。而SMA 为较为复杂的积分运算,对算力要求比较高,一定程度上会影响判定的实时性和高效性,故本文设计的算法中不考虑该特征。
本文设计的跌倒识别算法主要有以下几个判定条件。
①合加速度A 应当连续多次( ≥3 次)超过阈值1.7g
考虑到设备的灵敏度等问题,对于一些偶然的大幅度行为,可能导致速度突变,产生孤立的较大加速度值。故需要在一段时间内连续超过跌倒阈值,才可初步判定为“可能是跌倒”。该条件主要是为了排除一些突然的大动作导致的超过阈值的误判。
②倾角θ≤30 °
考虑到上下楼、跑步、跳跃等相对剧烈的运动加速度也会出现连续多次大于阈值,而倾角与站立姿态几乎没有变化,故通过人体倾角变化同时对跌倒进行判定。
利用三轴加速度传感器采集日常行为活动和跌落的数据,分析各个行为的特点,根据以上数据中的特征量,与跳跃、跑步、上下楼梯、蹲起等与跌倒加速度特征相似的剧烈运动进行对比,分析出合加速度峰值和倾角的特征,设置判定阈值并制定识别算法,最后在智能手机上验证了我们制定的实时跌倒识别算法。我们进行了20 组日常行为活动实验,每个实验组包含了正常行走、跑步、蹲起、跳跃和上下楼梯这5 项行为,以及10 组摔倒实验,每组实验包含前摔、后摔、行进中跌倒这3 种跌倒类型。如表2 和表3 所示,通过统计分析实验结果,我们得出了本算法跌倒识别的准确率达95%,漏报率0%,跌倒类型判断的准确率达90%。

表2 日常行为活动实验

表3 摔倒实验
实验平均准确率较高,响应时间在由仪器、实验方法所造成的误差范围内。该结果证明本文设计的算法可以将跌倒行为和缓慢行为以及剧烈运动进行区分,同时还可以判断跌倒的种类,并能及时发出报警,基本满足预期跌倒前识别并报警效果。由于没有SMA 算法,无法对运动剧烈程度进行判定,故测试结果中对于行进中摔倒有多次误判为前摔。对于较少的误判情况,未来需要再获取更多数据信息进一步分析处理,对阈值判别进行进一步的优化。在未来的工作中,我们将考虑使用工作轮询等方法,以更有效地解决使用智能手机作为传感平台连续运行工作的能耗问题。
5 总结
综上所述,通过算法和人体行为数据的匹配程度寻找“疑似”跌倒行为,解决了生活中缺乏训练样本的问题;然后加入倾角信息进行二次判断,在完成跌倒识别的同时,提高了近似行为的识别率,同时可以协助识别出不同的跌倒种类。仿真结果和理论分析表明,与其他三种方法相比,本文提出的方法具有更高的精度,同时有效地识别了坠落行为。特别适合日常以缓慢运动的老年群体。同时,本文研究的方法同时可以识别跌倒方式、具有较高精度、较低能耗的特点,可以提高跌倒防护产品的经济性和实用性,具有良好的应用前景。未来将把该算法应用于自主开发的嵌入式系统中,并配合快速充气和保护气囊等防护模块,实现的“跌落前识别,跌倒时防护”的完整功能。
猜你喜欢
当代水产(2022年6期)2022-06-29
中华养生保健(2022年10期)2022-05-23
四川工商学院学术新视野(2021年2期)2021-11-02
科学大众(2021年19期)2021-10-14
中国临床医学影像杂志(2021年6期)2021-08-14
北京汽车(2021年3期)2021-07-17
计算机工程与应用(2021年4期)2021-02-22
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
