
基于STM32 的智能消毒机器人设计
2024-04-16 03:25秦艳
电子制作 2024年6期
秦艳
(江苏联合职业技术学院 淮安生物工程分院,江苏淮安,223200)
0 引言
公共场所的消毒工作开展是否顺利,关系到人们的身体健康,也是公共卫生安全的重要工作之一。因此,对公共场所的消毒设备进行研究具有良好的应用价值。
近年来,随着人工智能技术的蓬勃发展,国内各大机构研发的消毒机器人,其智能化程度也日趋提升,机器人的各种功能也逐渐成熟。例如:2020 年,山东管理学院陈青华团队以智能家居理念为基础,开发了一款应用于酒店场景的多功能消毒机器人,实现了机器人在不同场景下的高效消毒动作[1];2021 年,江苏农林职业技术学院沈家礼团队结合人工智能深度学习方法,实现物体的准确识别和定位,并针对性进行消毒,提升了公共场所消毒的准确性,节约了消毒成本[2];2022 年,电子科技大学成都学院张伟团队,采用形态分析法提出了消毒机器人的结构设计方案,缩短了设计周期,提升了设计的效率[3];2023 年,中国石油大学王若暄团队通过设定风险区域,消毒机器人根据不同风险区域采用不同强度的喷洒措施,进一步提升了消毒的精确性[4];上述研究表明,消毒机器人的设计,主要根据应用场所的实际条件,包括:公共场所的面积、地面情况、拟消毒对象的布局等来进行针对性的功能和结构设计。鉴于此,本文以酒店为应用场景,以STM32 为主控芯片设计智能消毒机器人,以期达到高效、精准消毒的效果。
1 智能消毒机器人系统布局
智能消毒机器人设计的首要步骤,是结合其主要的功能,完成系统的布局。该部分中,主要采用的设计原理为功能与结构相统一的设计理念。即先通过确定机器人的基本功能,再选择能够实现该功能的对应结构、技术手段等,确定二者的对应关系,从而完成基本方案的布局。考虑到机器人消毒的场景为酒店,且主要在大厅、楼梯、过道以及电梯等场所进行消毒工作。在机器人的整个工作流程中,需要喷洒消毒液进行消毒,还需要通过移动前往不同的消毒场所以及对所在场所进行识别以确定具体位置等。因此,可以确定机器人的基本功能以及对应模块,具体情况如表1 所示。

表1 消毒机器人功能
确定上述模块之后,便完成了消毒机器人的基本结构布局。而要确保系统能够高效地按照指令进行动作,需要选择合理的主控制芯片。考虑到控制精度、指令传输的稳定性、系统运行的稳定性等因素,本文选择STM32 作为主控制芯片[5]。系统的整体布局,如图1 所示。
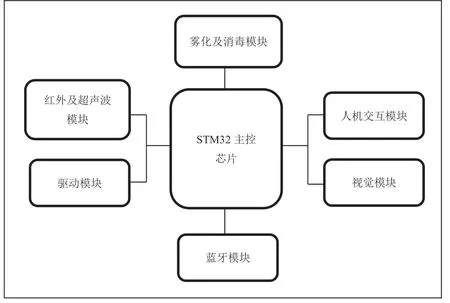
图1 系统整体布局
2 消毒机器人系统硬件设计
■2.1 主控制芯片的确定
主控芯片是整个消毒机器人系统的控制枢纽,也是实现对系统的各个设备进行状态监测和控制的核心部件。因此,其类型的选择是否与系统的特点适配,是决定系统运行效果的关键。就本文而言,消毒机器人的选择因素为:(1)主控芯片所占空间大小。作为喷洒雾化酒精的消毒机器人,内部具有装载酒精的容器、雾化器、各传感器、电机以及末端执行器等设备,再考虑到机器人本身的经济成本,故整个机器人内部应该具有紧凑型的特点。因此,在满足控制精度的前提下,应当尽可能选择体积和质量较小的主控芯片;(2)具有良好的信号处理能力。消毒机器人的系统复杂性程度较高,决定了其运行时必然需要计算、分析以及处理庞大的数据量,因此主控芯片对数据的处理能力也是选择因素之一;(3)系统性能是否复杂,搭载的传感器较多。对于消毒机器人而言,其传感器较多,故STM32 的选择中,是否具有DSP 指令集也是确保系统稳定运行的关键。结合上述因素,本文选择主控芯片类型为STM32F407,该芯片具有较高的计算速度、存储种类丰富以及系统稳定性高等特点[6]。
■2.2 红外及超声波模块
消毒机器人在酒店场景工作时,首先实现的基本功能是准确按照既定的路线行进。从而实现既定位置的消毒工作。因此,该功能的实现主要通过循迹系统来完成。消毒机器人在酒店运动时,由于酒店内通常光线比较充足,所以传感器需要选择受光线影响较小的类型。而红外传感器对可见光的适应性较高[7],故本文在设计循迹系统时,选择红外传感器,其传感电路如图2 所示。
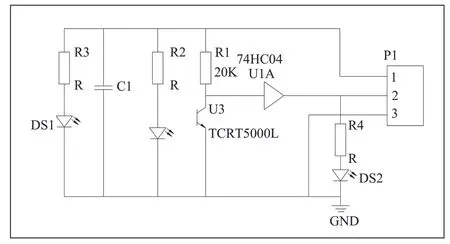
图2 红外模块的设计
消毒机器人在酒店行走时,经常在行进的前方会出现移动的以及随机的障碍物。因此,在距离障碍物较远的地方进行识别,并及时停止或改变行动方向非常重要。故机器人在运行中,除正常的循迹之外,远程避障功能也需要实现。鉴于此,本文采用超声波避障传感器进行识别[8],其电路如图3 所示。
■2.3 雾化及消毒模块
雾化及消毒模块是机器人进行消毒工作的末端执行器,消毒的形式为酒精喷雾式。该模块的工作流程为:(1)消毒指令动作。当机器人到达指定地点,控制系统对其位置进行确认后,指示消毒模块开始动作,即发出对指定区域进行酒精喷雾的指令;(2)雾化设备动作,将机器人内部存储的液体酒精转化为气体,然后末端执行器对消毒对象进行喷雾,该环节需要由实现雾化的驱动电路来实现,雾化模块驱动电路如图4 所示;(3)末端执行器对准消毒区域进行喷雾操作;(4)消毒模块停止动作。当喷雾量达到了预设的阈值后,反馈系统将检测数据传输至主控系统,系统通过分析、判断,发出停止动作的指令,指示消毒模块停止动作。
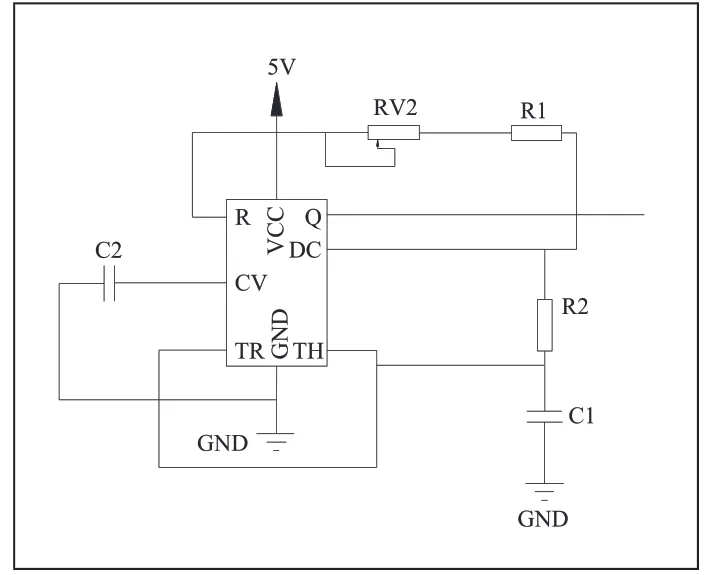
图4 雾化驱动电路
■2.4 驱动模块
对于机器人的行走机构而言,常用的结构包括轮式和足式。而足式的结构通常比较复杂,且关节部分的驱动设备较多,经济成本较高。另一方面,考虑到酒店的地面比较平坦,且进行消毒的频率较高。因此,设计成轮式结构能够使机器人比较快速地行走[9]。而对于驱动机构而言,轮式结构通常采取电机驱动方式[10]。机器人在运行过程中,存在转向、紧急制动以及速度控制等情况,故需要驱动电机具有较大的电磁转矩。所以,驱动电机的类型确定为控制直流电机,其调速系统的硬件电路设计,如图5 所示。
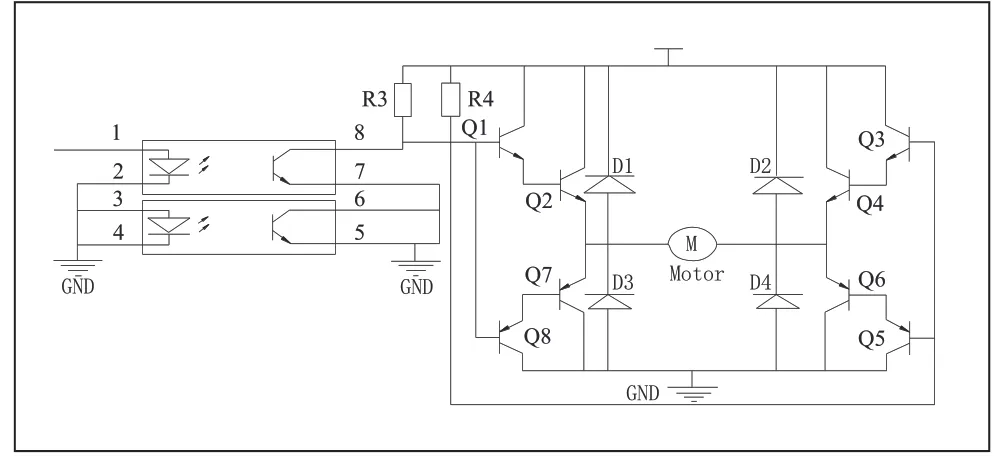
图5 驱动模块电路设计
■2.5 蓝牙模块
对于酒店而言,机器人的消毒场所通常是固定的。即机器人是在指定时间内,按照既定路线进行消毒工作。在无线通信模块的选择中,由于蓝牙模块具有作用范围较广、智能化程度高、经济性较好等特点,故可以选择蓝牙模块作为无线通信方式。且酒店内部通常WiFi 覆盖较广,与蓝牙模块进行配合使用,可以将蓝牙模块的作用距离大幅提升,还能增加该模块抗干扰的性能。因此,本文选择蓝牙HC-05 作为通信模块,硬件电路设计如图6 所示。

图6 蓝牙模块电路设计
■2.6 人机交互模块
智能消毒机器人的人机交互模块,是实现人工与机器人之间进行消毒状态、消毒位置以及消毒时间等情况交流的媒介,也是实现人工调整参数和发送指令的重要模块。该模块主要通过液晶显示来实现。在该模块的类型确定中,结合人机工程学原理,即人在操作设备时,液晶显示屏能否根据外界光线,自主调整显示亮度,以人眼最舒适的亮度进行呈现。因此,本文选择OLED液晶显示屏作为人机交互的媒介[11~12],其电路设计如图7 所示。
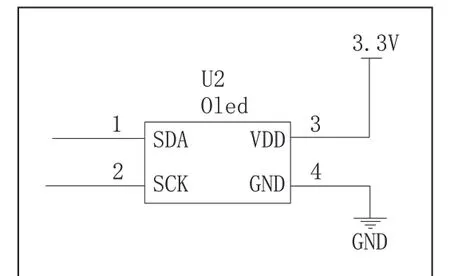
图7 液晶显示模块
3 消毒机器人系统软件设计
智能消毒机器人的软件设计,主要是围绕消毒功能的具体执行流程来开展。机器人在消毒过程中,需要通过视觉模块,对过道、电梯以及楼梯等对象进行识别,以此作为判断是否到达消毒地点的依据,并实施消毒动作。在算法的选择中,考虑到机器人需要准确定位和具有较快的响应速度,故本文选择Yolov5s 算法,其损失函数表达式为[13]:
式中,IOU为交并比损失,2ρ为欧式距离,b为预测边框中心点,bgt为真实边框中心点,C为对角线长度,α为平衡参数,gtω为真实边框的宽度,h gt为真实边框的高度,ω为预测边框的宽度,h为预测边框的高度。
实验对象包括楼梯、过道以及电梯,共1248 幅图片。训练集分布情况如表2 所示。

表2 训练集分布
目标测试的效果指标为平均精度以及平均精度均值。其中,平均精度的计算表达式为[14~15]:
式中,P为精确率,R为召回率。
平均精度均值的计算表达式为[14~15]:
式中,c为预测类别,n为预测类别数量。
目标测试的结果如表3 所示。

表3 目标测试的精度
从表3 所示的目标测试精度来看,楼梯和过道的识别精度较高,都超过了90%。主要原因在于楼梯和过道是静态对象,且体积较大,特征明显,只要通过充分的训练,则便于识别。而电梯的体积较小,且通常存在行人等电梯的情况,致使电梯口容易被阻挡,故识别精度稍低,但整体而言,目标的识别率达到了89.4%,基本满足要求。
4 结论
在消毒机器人的设计中,结合其应用的场景拟定基本的功能。完成了系统的基本布局、硬件设计以及软件设计等操作。从机器视觉的识别效果来看,其精度也基本满足要求,故机器人能够根据识别的结果对既定场所进行消毒操作,符合预期的设计构思。下一步工作,将在该结构的基础上,在消毒、循迹、避障、视觉等模块基础上,优化改进算法,进一步提升其智能化的能力。
猜你喜欢
工业设计(2022年7期)2022-08-12
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
中国医药指南(2017年3期)2017-11-13
妈妈宝宝(2017年2期)2017-02-21
玩具世界(2017年8期)2017-02-06
家庭科学·新健康(2016年9期)2016-10-25
发明与创新(2016年23期)2016-10-13
湖北工业大学学报(2016年5期)2016-02-27
汽车维修与保养(2015年6期)2015-04-17
