
基于STM32 的智能输液监测系统设计
2024-04-16 03:25刘豪张玉林李先余弦
电子制作 2024年6期
刘豪,张玉林,李先,余弦
(宜宾学院 智能制造学部,四川宜宾,644000)
0 引言
随着医疗设备更新,一些医院已实现了智能化输液,但是由于其使用成本高昂,所以有大部分医院还是依靠老式的输液方法,需要护士时刻盯着病人进行输液。本文设计的基于STM32 的智能输液监控系统在一定程度上可减轻医护人员的工作压力,也避免了因为疏忽而导致的医疗事故,可极大地减轻病人、家属、医护人员的监测工作量。此智能输液监控系统结构简单,操作方便,生产成本低,有利于生产和推广使用。
1 系统总体方案设计
控制系统总体设计框图[1]如图1 所示。该系统以STM32单片机主控电路为核心,其余分为五个主要模块:容量检测模块、滴速监控模块、数据显示模块、无线传输模块、报警模块。

图1 系统整体框架
该智能输液监测系统通过容量检测模块对液面进行实时监测,按键设置输液滴速,同时采用滴速监测模块对输液滴速进行实时监测。当实际滴速与设置滴速不符时,控制系统通过计算发出指令由舵机控制其转动,从而控制输液阀,使药液滴速与设置药液滴速相符。主控电路通过对传感器采集的输液信息进行处理,将输液状态数据实时显示在数据显示模块上,同时此系统通过无线传输模块将该数据实时传送到手机端APP 进行显示。如液面低于阈值或病人按下报警按钮,系统会自动进行报警操作。
2 硬件设计
该智能输液监测装置的硬件系统是采用STM32F103C8T6作为主控芯片,由DR-01 液体非接触液位传感器、光电槽型光耦传感器、TFT 彩屏、按键、蜂鸣器、ESP8266 无线WiFi模块等外围硬件电路组成。整体硬件系统采用的是USB 接口进行供电。
■2.1 主控芯片的选用
此项目选用的主控核心芯片是STM32F103C8T6,STM32 系列处理器是意法半导体公司生产的一种基于ARM 7 架构的32 位、支持实时仿真和跟踪的微控制器。该款控制芯片因其在医疗器械等领域中的应用广泛,更加具有学习和实验研究的价值。
■2.2 药液容量检测模块
药液容量检测模块采用DR-01 非接触液位传感器,是一款超高性能的非接触液位传感器。其超低功耗、环保物料、稳定可靠、不与液体接触、体积小、成本低、安装无需开孔,安装方便,检测液体种类多样。DR-01 液位传感器检测液位状态信息传输于主控芯片进行处理,从而实现对输液容量的实时监测。模块结构如图2 所示。

图2 模块结构图
■2.3 滴速监测与控制模块
该装置中滴液速度监测模块采用光电槽型光耦模块,该模块是基于红外对管模块的红外传感器。该传感器模块对环境光线适应能力强,具有一对红外线发射与接收管,发射管通过发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,接收管将接收到来自被反射的红外光线,从而产生信号经比较器电路处理之后,指示灯会亮起,同时信号输出接口输出数字信号。该模块广泛用于电机转速检测、脉冲计数、位置限位等。在该项目中用于液体滴速的监测,并且实时将滴液信息传输于主控芯片进行处理。原理如图3 所示。
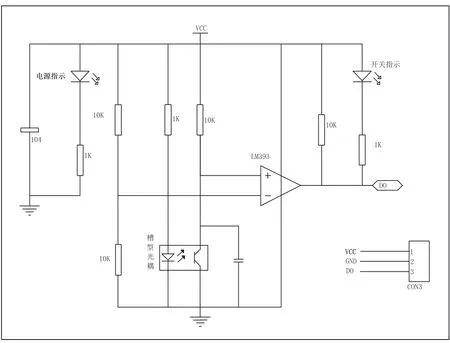
图3 滴速监测模块原理
流速控制是采用SG90 舵机模块,舵机[2]是一种位置(角度)伺服的驱动器,能够实现角度不断变化和保持。该装置中选择SG90 舵机用于控制输液阀门,从而控制流量大小,通过PWM 脉冲宽度可精确地控制其转动角度和扭力大小,可做到不破坏输液阀门也能通过该装置进行控制。控制原理如图4、图5 所示。

图4 PWM 脉冲宽度调制

图5 舵机输出轴转角与输入信号脉冲宽度关系
■2.4 无线传输模块
该项目中无线传输模块采用ESP8266WiFi 模块,该模块集成了业界领先的TensilicaL106 超低功耗32 位微型MCU,带有16 位精简模式,支持标准的IEEE802.11b/g/n 协议和完整的TCP/IP 协议栈。该装置通过STM32 单片机与ESP8266 进行串口通信发送AT 指令等信息,使ESP8266 作为TCP 服务端发送此输液系统的输液信息给TCP 客户端,从而实现在移动设备手机端APP 上实时接收显示输液系统的数据信息[3]。ESP8266 运用电路如图6 所示。
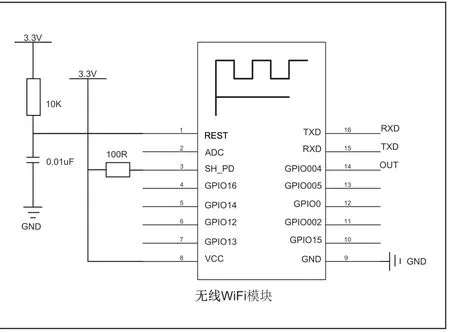
图6 WiFi 运用电路
3 软件系统设计
该项目采用Keil uCision5 开发环境在C 语言编程环境下进行开发,FlyMcu 进行STM32 程序代码最终的烧录。根据该项目要实现的逻辑功能,主要可分为以下几大板块,运用STM32 内部定时器对输液状态进行实时监测,当输液滴速与设定的目标滴速不符时,系统会对输液阀进行松紧控制,直到输液滴速与设定的目标滴速相符,系统控制输液阀松紧的档位将停止不变;系统会实时监测输液的容量状态,容量状态异常时,系统会进行报警操作[4];系统屏幕上可以显示输液滴速与剩余输液容量等信息;护士手机端APP 可实时接收来自下位机系统的输液信息;病人可以根据实际情况进行按键报警操作;系统总体软件的设计流程如图7 所示。

图7 软件流程图
主程序中编写液体流速控制及数据信息获取的关键逻辑代码程序,如下所示。

4 系统与功能测试
首先检测各个模块线路是否接好,检查发现无误之后,使用杜邦线将各个模块连接起来,对系统整体硬件进行调试检查,同时用万用表、示波器等设备进行测量各个模块的工作参数是否正常。万用表分别测试单片机的供电电压是否为3.3V 工作电压,舵机的工作电压是否在5V~6V 工作电压内,非接触液位传感器的工作电压是否在3V~5V 工作电压内,滴液流速监测模块的工作电压是否在3.3V~5V工作范围内,并且用示波器测试舵机信号输入线的PWM 波形是否输入正常,所有模块测试正常工作后,进行整体系统电路测试。系统电路原理如图8 所示。

图8 系统电路原理图
使用FlyMcu 对STM32 进行串口程序烧写,程序烧写成功后,系统上电初始化,初始化成功后,舵机模块经PWM 调制波驱动后转动到初始转向角;光电槽型光耦模块对反射回的红外光线进行处理后,再输出数字信号传给单片机;DR-01 非接触液位传感器将监测到的液位信息转换成数字信号输出传给单片机;TFT 彩屏显示相应数据。
通过按键进行容量和滴速的设置,设置完成后进行系统测试,根据各模块在屏幕上显示的参数和实际的工作状态,在Keil uCision5 开发平台进行反复调试烧写程序代码,直到系统正常工作后,进行功能测试,记录系统在不同条件下功能测试的结果。
功能测试结果如下:输液系统正常进行工作且滴速正常时,舵机控制的档位不变,如图9 所示。滴速高于设置滴速时,舵机控制的档位增加,如图10 所示。滴速低于设置滴速时,舵机控制的档位减小,如图11 所示。当系统没检查到液位时,会进行报警,并且在TFT 彩屏上显示液位偏低,如图12 所示。
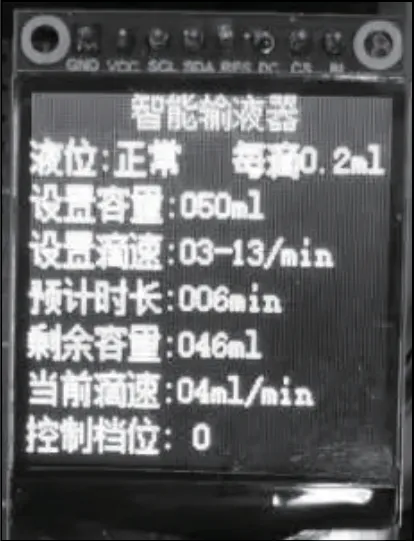
图9 滴速正常

图10 滴速过快
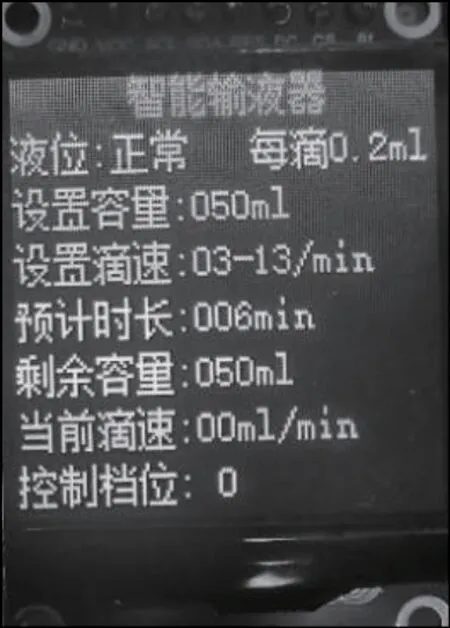
图11 滴速过慢
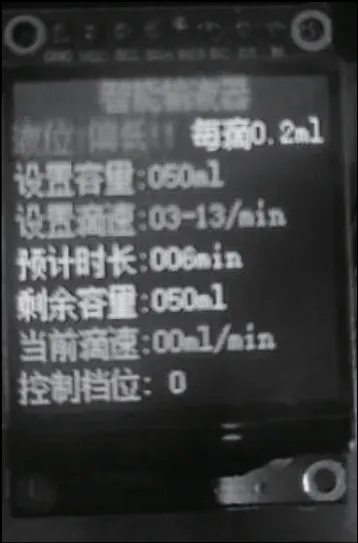
图12 液位偏低
5 结束语
本文基于STM32设计的智能输液监控系统通过滴液监测传感器、舵机、TFT 彩屏等模块可实时监测并显示病人的输液状态,并可根据实际情况对输液状态进行调节。多次的测试结果表明,此系统设计装置可以使病人有更好的医疗体验,并且能有效减轻医护人员的工作负担,因此本产品有望得到广泛的推广应用。
猜你喜欢
中国药业(2023年21期)2023-11-14
高校化学工程学报(2020年2期)2020-06-10
原子能科学技术(2020年1期)2020-03-30
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
护士进修杂志(2016年10期)2017-01-05
健康博览(2015年7期)2015-08-08
舰船科学技术(2015年8期)2015-02-27
中国医学创新(2014年19期)2014-08-19
