
一种适用于激光测速系统的自适应CFAR 算法
2024-04-16 03:25黄黎平唐诗刘兴涛
电子制作 2024年6期
黄黎平,唐诗,刘兴涛
(1.中国直升机设计研究所,江西景德镇,333000;2.成都凯天电子股份有限公司,四川成都,610031)
0 引言
激光测速系统利用多普勒效应和大气米散射效应进行速度参数的探测[1],系统的速度探测性能会受到大气成分、大气运动、激光的多路径传输过程及激光器的相对强度噪声和相位噪声等影响,影响系统高精度探测的主要因素包括:硬靶干扰、大气环境特性干扰及系统自身光电特性干扰等[2~5]。
激光测速系统有着复杂的应用环境,又受到自身光电特性干扰,且激光测速系统探测到的空速信号信噪比较低,如果使用固定检测阈值或者单一的恒虚警算法,极易对干扰信号造成误检[6~7]。目前各类型的恒虚警算法应用于激光测速系统中均存在不足,比如单元平均恒虚警算法易将能量较大的激光器强度噪声误检为有效信号,单元平均取大恒虚警算法会对能量较大的干扰信号附近的微弱信号造成漏检。综上,单一恒虚警检测算法易受激光测速系统干扰信号的影响,无法有效检测空速信号[9]。
传统目标检测的主要手段是通过人工判断或者设置固定检测阈值,但不同的干扰源具有不同的信号特性,固定检查阈值存在局限,需要针对不同的干扰源设计合适的检测阈值提高系统对于目标信号的有效探测率[10~11]。根据系统中不同干扰源的信号特性,本文基于恒虚警(CFAR)检测设计了一种适用于激光测速系统的自适应CFAR 算法。
1 基本原理
恒虚警(Constant False Alarm Rate,CFAR)检测在雷达数据检测中具有广泛的应用,该检测算法可以根据背景噪声、杂波和干扰信号自适应调整阈值大小,使虚警概率恒定[1]。根据不同的应用环境和干扰信号特征选择不同的恒虚警检测器,主要有噪声恒虚警、单元平均恒虚警、有序恒虚警检测器等。单元恒虚警检测器作为最常用的恒虚警检测器,示意图如图1 所示。
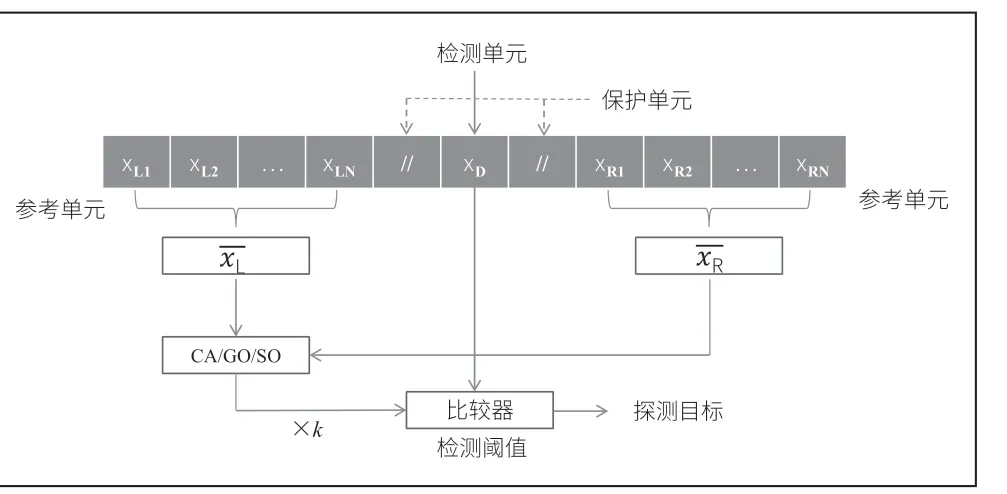
图1 单元恒虚警检测器示意图
CA-CFAR,GO-CFAR 和SO-CFAR 三种检测器的检测门限为[2]:
其中kCA、kGO、kSO分别为单元平均恒虚警算法、单元平均取大恒虚警算法、单元平均取小恒虚警算法的乘性因子;VCA、VGO、VSO分别为采用单元平均恒虚警算法、单元平均取大恒虚警算法、单元平均取小恒虚警算法计算得到的检测门限。在单元恒虚警检测器中,检测阈值由参考单元的信号均值和乘性因子k 决定,选择合适的参考单元、CFAR 类型和乘性因子具有重要意义[3]。
2 算法设计
激光测速数据系统通过相干探测鉴频得到某时刻整个电子系统采样带宽内的散射信号频谱,其中包括空速多普勒移频信号、直流噪声信号、激光器相对强度噪声和相位噪声及干扰物多普勒噪声信号等,如图2 所示。

图2 激光测速数据系统频谱信号示意图
不同时刻的干扰信号具有不同的频率成分,不能直接对本底噪声进行抑制。如果使用固定检测阈值,极易对干扰信号造成误检,如图2 中的激光器强度噪声和相位噪声,这两种噪声信号具有较强的能量,容易超过检测阈值,干扰检测结果。为了准确解算大气矢量信号,从信号频谱中精确地检测出空速多普勒移频信号,我们基于恒虚警(CFAR)检测原理设计了一种用于激光测速的自适应调整检测阈值的算法,设计的算法流程如图3 所示,通过检测单元的变化指数角系数Sk=xD-xD-1 自适应调整参考单元与保护单元的个数及选择CFAR 处理方法。

图3 一种自适应CFAR 检测流程图
S1:对激光测速数据系统取得的频谱数据,采用汉明窗函数对频谱数据进行平滑滤波,其窗口长度为激光测速数据系统输出频谱数据总的单元个数除以100 后取整,该步骤可以有效去除随机噪声点。
S2:本文假设左右参考单元窗长都为10 个单元,左右保护单元都为2 个,根据滤波后的频谱数据滑窗计算每个检测单元的角系数指标Sk。
S3:将角系数指标Sk与阈值Ts和Tg(Tg>Ts)进行判断,根据判断结果选择对应的处理方法得到各时刻的对应检测门限,检测门限的计算见公式1。如果Sk
S4:将每个检测单元与对应检测门限进行比较,当检测单元数值大于步骤S3 中的检测门限时,判断为空速信号。
3 试验结果与分析
为了验证算法对空速信号探测的准确性,将激光测速系统进行飞行试验,对取得的频谱信号进行分析,得出每时刻的真空速,最终对比系统输出的真空速数据与GPS 速度动态变化的一致性。激光测速系统安装如图4 所示。

图4 激光测速数据系统机上安装
激光测速系统飞行试验取得的频谱如图5(a)所示,图中绿色实线表示待测信号,红色虚线表示本文提出的自适应CFAR 算法取得的检测阈值,蓝色点划线表示使用传统的CA-CFAR 算法得到的检测阈值。将频谱目标区域进行局部放大,如图5(b)所示,图中红色空心圆圈表示使用自适应CFAR 算法检测到的有效峰值,蓝色星点表示CA-CFAR 算法检测到的有效峰值。可以看出传统的CA-CFAR 算法抗环境干扰能力差,会将具有较高能量的激光器强度噪声干扰信号误检为有效信号。
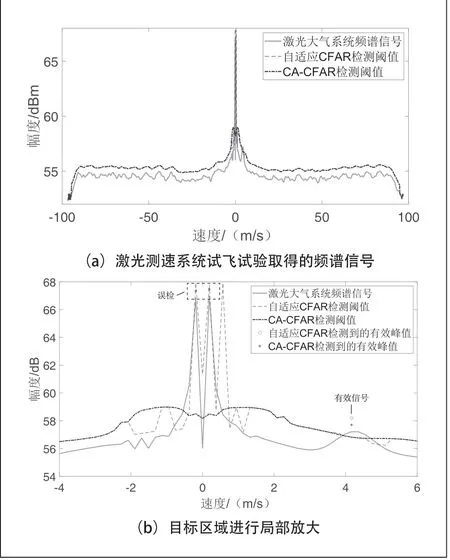
图5 激光测速系统试飞试验算法对比(误检)
另一时刻的激光测速系统飞行试验取得的频谱如图6(a)所示,该时刻激光器相位噪声信号频谱成分与图5(a)中的相位噪声信号不同,但无论是自适应CFAR 算法还是CACFAR 算法取得的检测阈值都能随着干扰信号不同而自主调整检测阈值,验证了CFAR 检测在复杂环境中的性能优势。将频谱目标区域进行局部放大,如图6(b)所示,可以看出当低信噪比的有效信号在能量较强的干扰信号附近时, CACFAR 检测容易出现漏检。使用利用角系数的自适应CFAR算法能提高信号的有效探测率。

图6 激光测速系统试飞试验算法对比(漏检)
比较采用自适应CFAR 算法与CA-CFAR 算法在系统不同信噪比条件下的数据检测率结果,如图7 所示,图中蓝色实线表示自适应CFAR 算法的检测概率,红色虚线表示CACFAR 算法的检测概率。统计结果表明,自适应CFAR 算法在信号低信噪比时比CA-CFAR 算法有更高的检测概率,即使在信号信噪比为0.5 的情况下也具有45%的检测概率,整体性能优于传统的CFAR 算法。

图7 自适应CFAR 算法和CA-CFAR 算法性能对比
使用自适应CFAR 算法对激光测速系统试飞频谱数据进行空速信号检测,根据频谱数据解算出飞机真空速,探测结果与GPS 数据变化吻合,如图8 所示,图中蓝色点线表示GPS 输出的地速信号,绿色点线表示激光测速系统输出的真空速,红色虚线表示飞机飞行高度。

图8 激光测速系统解算真空速与GPS 速度对比
4 结束语
本文基于单元平均恒虚警检测器,提出一种用于激光测速系统的自适应CFAR 检测算法,并给出了算法流程。对激光测速数据进行特征分析,利用角系数对算法中的参考单元和保护单元进行自适应调整,此算法用于一维的频谱信号检测,相较于传统的CFAR 算法检测,降低了系统的误检、漏检概率,有效地提高了信号检测率,特别增加了信噪比小于1.5dB 时的探测概率。后续将对自适应CFAR 进一步优化,推广应用于激光测速系统二维数据信号探测。
猜你喜欢
兵工学报(2022年11期)2022-12-01
电气技术(2021年3期)2021-03-26
空间科学学报(2021年6期)2021-03-09
通信电源技术(2020年22期)2020-03-27
物联网技术(2019年9期)2019-11-06
测控技术(2018年7期)2018-12-09
科学与财富(2017年24期)2017-09-06
设备管理与维修(2017年1期)2017-04-11
工业设计(2016年6期)2016-04-17
海军航空大学学报(2015年4期)2015-02-27
