
耳石症治疗系统模型设计与制作
2024-04-16 03:25熊威喻亚云孟令权武泱光何浩洋胡安正
电子制作 2024年6期
熊威,喻亚云,孟令权,武泱光,何浩洋,胡安正
(湖北文理学院 物理与电子工程学院,湖北襄阳,441053)
0 引言
如今随着科学技术的迅速发展,智能化器械已经进入了医疗领域之中,各种技术在治疗关于眩晕症状的疾病得到了广泛地应用。良性阵发性位置性眩晕(BPPV)也叫耳石症,它是一种眩晕性疾病[1]。耳石症是因患者头部迅速转动进而激发短暂阵发性眩晕、眼震等症状,该种疾病是临床常见眩晕疾病,其主要表现为短暂眩晕、眼震等,同时易引发耳部疾病的发生,出现内耳供血不足、老年性退行 性改变等并发症,致使患者正常社会生活受到极大影响[2]。
耳石症最根本、最有效的疗法是,让自动脱落的耳石“复位”。一般治疗耳石症的复位方法有两种,一种是医生使用诊断手法复位,另一种是使用仪器输入指令进行自动复位。人工手法复位作为传统的复位方法,虽然对一些简单的耳石症患者可以获得较好的复位效果,但也存在诸多弊端。手法复位治疗更多地依靠复位医生的经验和判断,复位效果与经验有很大关系;人工手法复位在治疗过程中对患者眼球震颤的观察主要依赖医生肉眼观察。相比之下,耳石复位仪可带动人进行旋转,进而使耳石位置角度的控制更加准确,并且也提高了复位的效率;无需过度耗费医生体力。
对此,本文拟设计出一款高智能、功能全、易操作的智能化眩晕诊疗一体机,该机设置有多功能可选择式的操控面板和友好交互的可视显示屏,可以实现一键自动诊疗任务。该仪器一旦推广应用必然会惠及一些乡镇级医院和广大的耳石症患者,继而也会带来巨大的经济和社会效益。
1 智能化眩晕诊疗一体机总体设计思路
本文实施方案的内容主要是治疗仪变位方案。用户在主控制器的控制界面可以手动选择诊断模式、治疗模式和傻瓜式一键操作自动选择模式。在治疗仪的变位装置之中设计角度采集装置,并将角度信息发送给主控制器。系统治疗仪变位方案框图如图1 所示。
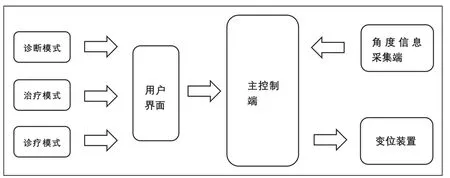
图1 系统治疗仪变位方案框图
2 总体系统的器件选用及结构搭建
■2.1 主控端MCU 芯片
智能眩晕诊疗系统的主控MCU 采用了语法较为简单、开发难度低的STM32 芯片,该芯片不仅降低了开发成本,还具有查询速度快、容量大等优点,解决了大多数生产者两者不能兼顾的问题。STM32 系列微控制器还提供了丰富的外设资源,包括模拟输入输出、数字输入输出、通信接口、定时器、中断控制器等,可以满足各种应用的需求。
■2.2 角度采集端MCU 芯片
该系统的角度采集端主控选用的是由宏晶公司(STC)推出的STC8A,该芯片拥有丰富的外设,包括多个定时器/计数器、多通道的ADC(模数转换器)、UART(串行通信接口)、SPI(串行外设接口)等。考虑到角度采集端的数据处理量没有主控的大,这些外设足以完成该系统对于姿态信息的采集与解算,并且可以与主控端进行数据的传输与通讯。故而使用该款芯片作为角度采集端的主控芯片。
■2.3 驱动模块
本次项目使用A4988 驱动模块来控制该系统的电机,如图2 所示。本系统变位装置中的电机选用步进电机,其角位移量(或直线位移量)与电脉冲数成正比,步进电机所承受的负载能力,不会根据电机的电压扰动及环境条件所影响[3],选用A4988 模块用于步进电机的驱动,主要考虑到了以下几个优点:它采用直流电动机驱动技术,在精密步进电机驱动方面得到了大量的应用,具有多种控制方式,全桥式恒流电路和智能步进控制,可以满足不同精度要求的电机控制需求。芯片具有低功耗,高功率,低噪音,高精度等特点,可以在体积小的条件下实现高精度的控制和稳定的输出。

图2 A4988模块
■2.4 无线模块
本次项目使用NRF24L01无线模块用于本系统主控制端与角度信息采集端电路之间的信息传输。NRF24L01 是一种在2.4GHz~2.5GHz 频带中具有良好传输性能的无线发射或接收设备。它配备了频率合成器、功率放大器、晶体振荡器、调制器等功能模块。输出功率和通信信道可以通过程序进行配置,无线模块如图3 所示。

图3 无线模块
■2.5 主控制端电路
主控制端采用STM32 进行系统控制,该电路外设主要有下载电路、电源电路、电机驱动模块、LCD 屏、无线模块组成。主控制端电路实物图如图4 所示,电路图如图5 所示。STM32 系列微控制器采用了ARM Cortex-M 内核,提供了高速处理能力和丰富的外设资源,可以满足各种应用的需求。对于下载电路来讲,是通过STM32 芯片固有的下载引脚使用ST-LINK 下载程序。当BOOT0 为1,而BOOT1为0 时STM32 进入下载模式,该电路在程序下载时,会使BOOT0 拉高并进入下载模式,程序下载完成后,BOOT0 拉低进入程序运行模式。对于电源电路的设计,诊疗系统的电源芯片选用LM2596-5V 芯片和LMS1117-3V3 芯片,它们分别是5V 开关电源稳压芯片和3V3 线性稳压芯片。

图4 主控制端电路实物图

图5 主控制端电路图
■2.6 角度信息采集端电路
角度信息采集端电路采用STC8A 芯片进行角度信号采集。角度信息采集电路实物图如图6 所示,电路图如图7 所示。该电路主要包括MPU6050 模块、无线模块等。MPU6050 模块可以将机械旋转或倾斜转化为电信号输出。信号放大器用于放大传感器输出的微弱信号,增强信号的稳定性和可靠性。数据处理器则用于对放大后的信号进行数字化处理,将角度信息转化为数字信号输出[4]。将该模块放置在变位装置的中心角度,即可监测变位装置的旋转角度。

图6 角度信息采集电路实物图

图7 角度信息采集电路图
3 系统的软件部分设计
■3.1 本章概述
智能眩晕诊疗系统软件设计的介绍:首先从界面设计分析了三种模式对应的功能。其次,需要根据角度信息的反馈从而控制步进电机的转动。软件设计结构图如图8 所示。

图8 整体软件设计图
■3.2 控制系统的界面显示
控制系统的界面显示是使用LCD液晶显示屏进行显示。本系统在液晶屏中设置三个选项“诊断”“复位”和“诊疗”。这三种模式避免过多的文字和图标,方便用户快速定位和使用。对于“诊断”和“复位”选项可由专业医生依据患者症状初步判断耳石症类型,并进行耳石症复位。而“诊疗”选项为“一键傻瓜式”自动诊疗,无需专业医生进行操作。系统界面显示如图9 示。

图9 系统界面显
■3.3 步进电机旋转控制算法
本系统使用的是PID 算法来控制步进电机的旋转。步进电机是一种将电能转化为机械能的电机,其转动角度由输入的电脉冲数量决定。由于步进电机本身的惯性及其承载的负载,电机在运行过程中无法立即启动和停止,而是在启动过程中会出现阶跃损失,在关闭过程中会发生阶跃[5]。因此,为了准确控制电机的旋转角度,需要一个角度信息的反馈,从而实现闭环控制的效果。PID 算法是控制类最广泛的算法之一。在涉及闭环系统的控制中,它可以对输出的结果进行自动准确的校正[6],所以本系统使用PID 控制算法来控制步进电机的旋转。
■3.4 角度姿态解算
本文采用卡尔曼滤波算法,卡尔曼姿态解算结构图如图10 所示。使用RT-Thread 国产操作系统,利用env 工具进行串口、模拟I2C 环境配置,使用10ms 的线程进行卡尔曼滤波解算。因为MPU6050 没有包含磁力计,故无法对yaw轴运用卡尔曼滤波算法。利用MPU6050 中加速度传感器采集到的xyz 轴的加速度和陀螺仪采集到的xyz 轴的角速度,进行进一步处理,得到pitch 轴和roll 轴的原始角度,利用原始角度和角速度进行卡尔曼滤波处理,最终得到滤波后的角度数据。
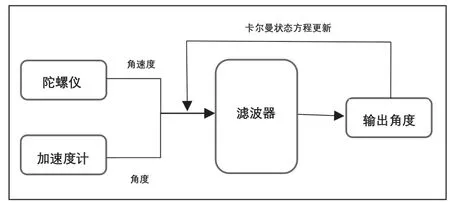
图10 卡尔曼姿态解算结构图
4 结束语
智能化眩晕诊疗一体机是一种集诊断、治疗和康复于一体的医疗设备。它可以通过多种传感器和算法对患者的眩晕症状进行评估和诊断,并提供个性化的治疗和康复方案。本文采用了步进电机、无线模块、MPU6050 模块、微处理器等模块设计出一款低成本、高智能、功能全、标准化、易操作的智能化眩晕诊疗一体机。但是由于时间和目前能力的有限,针对1:1 实物模型制造难度较大,只能制作小模型进行演示。智能眩晕诊疗系统的研究和应用已经逐渐复现在人们的眼前,这些医疗系统的设计需要具备足够的应变能力。相信随着医疗技术和电子控制技术的不断发展,智能眩晕诊疗系统在未来能发挥更大的作用。
猜你喜欢
保健与生活(2023年23期)2023-12-26
电子测试(2021年9期)2021-06-17
电子制作(2021年9期)2021-06-17
中华养生保健(2020年7期)2020-11-16
老友(2018年7期)2018-08-08
科学生活(2017年9期)2017-10-16
山东工业技术(2017年18期)2017-09-12
汽车维护与修理(2017年17期)2017-02-07
云南畜牧兽医(2015年4期)2015-02-28
建筑机械化(2015年7期)2015-01-03
