
复式大蒜种子方向控制装置设计与试验
2024-04-27 15:43张鹏飞刘冬梅崔荣江徐亚丹
中国农机化学报 2024年3期
张鹏飞 刘冬梅 崔荣江 徐亚丹

摘要:为提高大蒜播种机对杂交蒜的播种正芽率,提出串联使用大蒜种子重心靠下和大蒜种子芽尖细长特征进行种子方向控制的方法,即在排种器运种阶段设计分段式护种槽,利用大蒜种子重心靠下特征提高种子直立进入定向器的概率,在换向阶段设计弧形开口定向器,使大蒜种子芽尖尽可能露出定向器,提高短芽尖大蒜鳞芽的正芽率。以定向速度和种子芽尖长度为试验因素,正芽率为试验指标,进行台架试验,结果表明,蒜瓣芽尖长度对播种机正芽率影响较为明显,正芽率随定向速度的增加而降低。以金乡杂交蒜为试验对象,对定向系统进行田间播种性能试验,试验结果表明:行走速度为0.14~0.19 m/s时,金乡杂交蒜的正芽率达85%,整体满足大蒜播种农艺要求。串联使用大蒜种子两种物理特征从作业原理上可提高大蒜种子定向稳定性,为大蒜播种机械化发展提供参考。
关键词:大蒜播种机;复式定向;弧形开口定向器;分段式护种槽
中图分类号:S223.2+3 文献标识码:A 文章编号:2095-5553 (2024) 03-0008-06
Design and experiment of directional control device for compound garlic seeds
Zhang Pengfei, Liu Dongmei, Cui Rongjiang, Xu Yadan
(Hangzhou Vocational & Technical College, Hangzhou, 310018, China)
Abstract:
In order to improve the seeding bud rate of hybrid garlic by planting garlic seeder, a method was put forward to control the direction of garlic seeds by using the lower center of gravity of garlic seeds and the elongated sprout tips of garlic seeds in series, namely,the sectional kind of groove was designed in the metering device stage, using garlic seed characteristics under focus on improving seed straight into the orientation of probability. In the commutation stage, the arc opening directional device was designed, the germination tips of garlic seeds were exposed as much as possible to improve the positive germination rate of garlic scaly buds with short bud tips. With orientation speed and seed tip length as test factors and positive bud rate as test index, bench test was conducted. The results showed that the effect of garlic bud tip length on the positive bud rate was obvious, and the positive bud rate decreased with the increase of orientation speed. Taking Jinxiang hybrid garlic as the experimental object, the field sowing performance of the directional system was tested. The experimental results showed that the positive budding rate of Jinxiang hybrid garlic reached about 85% when the walking speed was in the range of 0.14-0.19 m/s, which generally met the agronomic requirements of garlic sowing. Using the two physical characteristics of garlic seeds in series can improve the directional stability of garlic seeds from the operating principle. This study will provide a reference for the development of garlic seeding mechanization.
Keywords:garlic seed drill; compound orientation; arc open directional device; segmental seed protection groove
0 引言
中國是世界上最大的大蒜生产国和出口国,大蒜为农民增收、国家创汇做出重要贡献,作为天然抗生素,大蒜产业极具潜力[1, 2]。大蒜优质高产栽培最适宜的播种方式为精量定向播种(单粒正芽播种),在自动破膜率、出苗时间、苔茎长、鳞茎横径和鳞茎重方面都有一定优势[3, 4]。杂交蒜是国内重要头蒜品种(收获蒜头为主),种植面积约占全国的70%,但其种子芽尖弯短、种子形态复杂重心不稳定、种体体积差异近2.5倍、机械破瓣还会造成20%左右种子脱皮,种子物理特征过于复杂给杂交蒜机械化精量定向播种带来极大困难。
大蒜种子定向是大蒜播种关键技术之一,现有典型机械定向法主要有水浮种法[5]、螺旋弹簧方法[6]、种子芽尖法[7]和多层锥碗法[8]。利用水定向,湿的蒜瓣累积会造成下栽鸭嘴粘土;利用螺旋弹簧定向,大蒜种子在螺旋弹簧中碰撞,工作效率和稳定性较差;利用大蒜种子芽尖定向,适用于大蒜种子芽尖直长的大蒜品种,如苍山四六瓣大蒜;利用多层锥碗方式定向,适用于种体形态规则的苔蒜品种。还有学者采用人工干预的方式进行种芽调整,如耿爱军[9]、栗晓宇[10]等利用蒜种盒人工提前放种实现种芽朝上播种。机械种子定向方式一般利用大蒜重心靠近尾部或种子芽尖细长特征,对于形状规则、种子芽尖细长大蒜品种具有良好效果,但对于形状复杂、种子芽尖较短的大蒜品种适应性较差。除机械定向,学者还会采用光电法对大蒜种子朝向识别,如Kim[11]、Liu[12]、Lei[13]、Du[14]、方春[15]、Geng[16]、Li[17]、侯加林[18]等先后提出利用数字图像、模式识别、深度学习、光电识别和红外线等技术进行大蒜种子定向控制。光电法仍处于实验室阶段,可靠性、稳定性、适应性和经济性距离实际推广应用仍有很大距离。
杂交蒜种子物理特征复杂,仅靠一种物理特征难以保证稳定直立播种。为此,提出串联使用大蒜种子重心靠下和大蒜种子芽尖细长特征进行种子方向控制的方法,分析大蒜种子在护种槽和定向器环节的受力及种子调整方式,开发分段式护种槽结构和弧形开口定向器。
1 大蒜种子物理特征参数测定
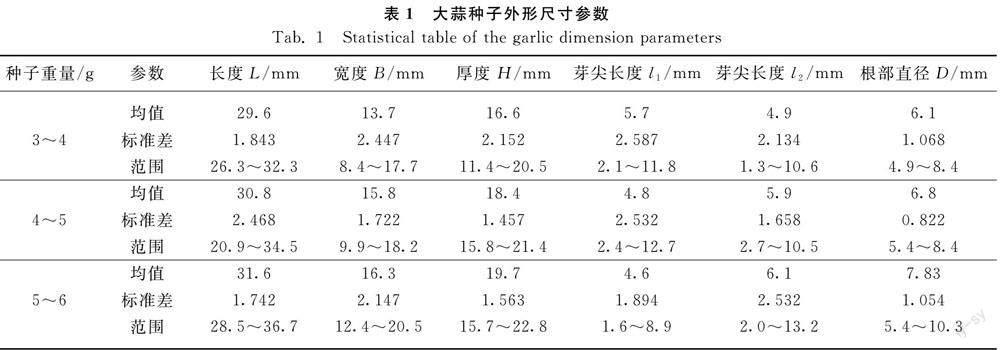
以金乡杂交蒜为研究对象,人工进行破瓣分级。适于播种蒜瓣一般为3~6 g,以1 g为单位分级,每个等级蒜瓣随机取样50颗测量,蒜瓣外形尺寸参数如图1所示,統计其长度L、宽度B、厚度H、芽尖长度l1、芽尖长度l2和根部直径D,统计结果如表1所示。
由表1可知,金乡杂交蒜的长、宽、厚随重量的增加而均匀增加,蒜瓣芽尖长度随重量增加不明显,芽尖长度l1和芽尖长度l2差距不大,根部直径D的均值大于6 mm。
2 整机结构与种子控制过程分析
2.1 整机结构
2BUX型大蒜播种机整体结构如图2所示,由单粒取种装置、定向器、直立下栽装置、传动系统、平整地装置、地轮等组成,核心零部件为取种勺、定向器和直立下栽器。播种机通过悬挂系统挂接在拖拉机上,拖拉机牵引播种机作业。整地器由旋耕机和镇压轮组成,旋耕机将种植面先旋松再由镇压轮压平,保证种植深度一致。后地轮转动为机具总动力来源,地轮通过传动系统将动力按比例传递给下栽装置和取种装置。取种装置将蒜瓣从种箱逐颗取出,经过护种槽逐颗落入定向器,进行种子方向调整,最后由下栽装置实现种子的入土直立栽种。
2.2 复式转动定向机构工作过程
复式转动定向机构由护种槽和定向器串联组成,如图2(b)所示。大蒜种子由排种器逐一进入护种槽,依靠护种槽特殊曲面结构,结合大蒜种子重心靠下特性,使大部分大蒜种子直立落入种子方向控制器内。当种子芽尖朝上时,定向器活动部件与栽种器接触打开,蒜瓣直立进入栽种器;当种子芽尖朝下时,栽种器压到漏出定向器的芽尖,随着定向器活动半件打开一定角度,在重力作用下,种子芽尖发生变形,大蒜种子翻转180°,芽尖朝上进入栽种器。从理论上,大蒜种子通过护种槽直立进入定向器的比例越高,机器直立栽种效果越好,即大蒜种子方向控制由护种槽和定向器共同控制,串联使用大蒜种子两种物理特征,可从作业原理上提高大蒜种子定向稳定性,且不会影响整机作业效率。
3 关键部件设计
3.1 分段式护种槽
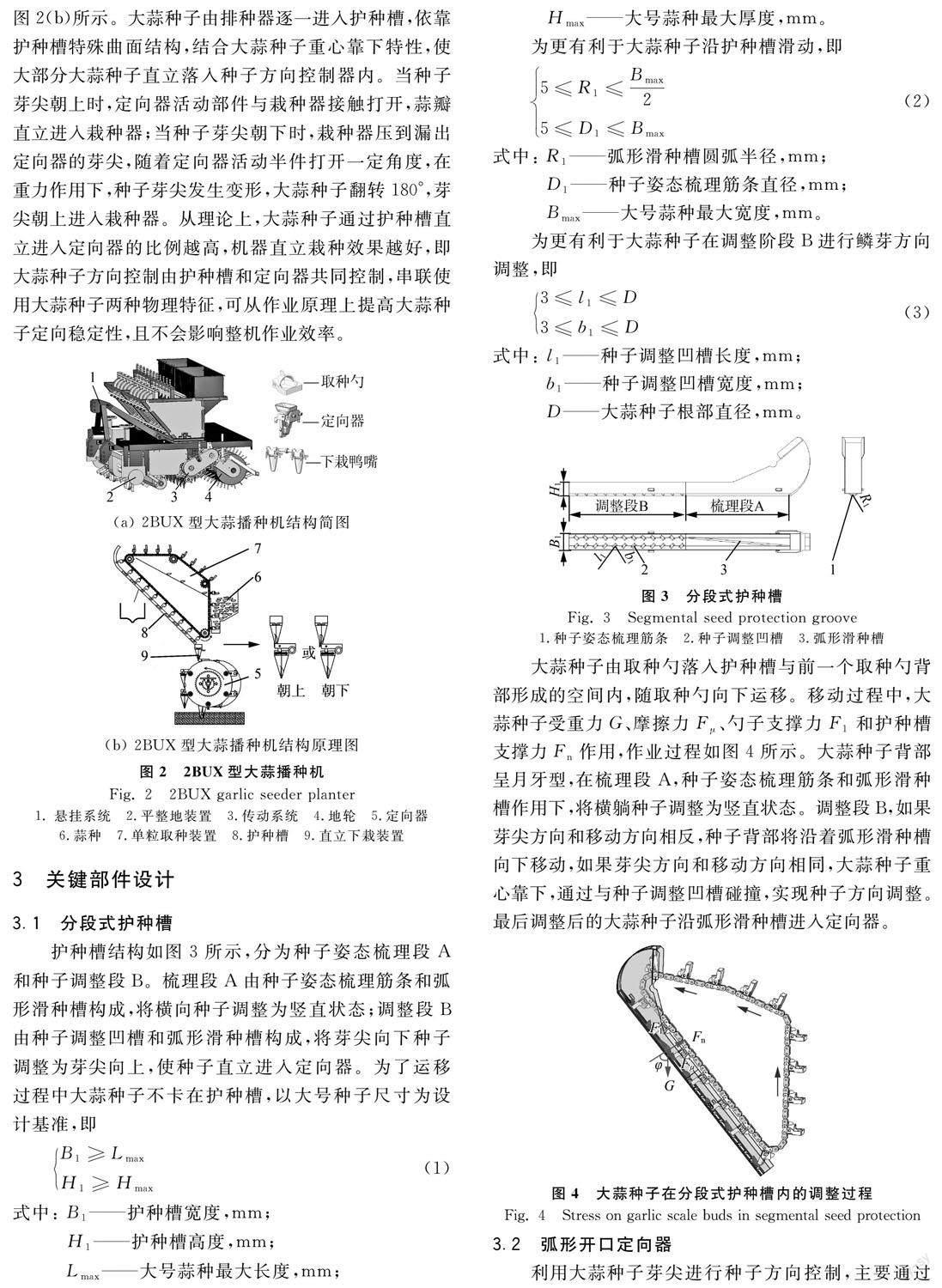
护种槽结构如图3所示,分为种子姿态梳理段A和种子调整段B。梳理段A由种子姿态梳理筋条和弧形滑种槽构成,将横向种子调整为竖直状态;调整段B由种子调整凹槽和弧形滑种槽构成,将芽尖向下种子调整为芽尖向上,使种子直立进入定向器。为了运移过程中大蒜种子不卡在护种槽,以大号种子尺寸为设计基准,即B1≥LmaxH1≥Hmax(1)
式中:B1——护种槽宽度,mm;H1——护种槽高度,mm;Lmax——大号蒜种最大长度,mm;Hmax——大号蒜种最大厚度,mm。
为更有利于大蒜种子沿护种槽滑动,即5≤R1≤Bmax25≤D1≤Bmax(2)
式中:R1——弧形滑种槽圆弧半径,mm;D1——种子姿态梳理筋条直径,mm;Bmax——大号蒜种最大宽度,mm。
为更有利于大蒜种子在调整阶段B进行鳞芽方向调整,即3≤l1≤D3≤b1≤D(3)
式中:l1——种子调整凹槽长度,mm;b1——种子调整凹槽宽度,mm;D——大蒜种子根部直径,mm。
1.种子姿态梳理筋条 2.种子调整凹槽 3.弧形滑种槽
大蒜种子由取种勺落入护种槽与前一个取种勺背部形成的空间内,随取种勺向下运移。移动过程中,大蒜种子受重力G、摩擦力Fμ、勺子支撑力F1和护种槽支撑力Fn作用,作业过程如图4所示。大蒜种子背部呈月牙型,在梳理段A,种子姿态梳理筋条和弧形滑种槽作用下,将横躺种子调整为竖直状态。调整段B,如果芽尖方向和移动方向相反,种子背部将沿着弧形滑种槽向下移动,如果芽尖方向和移动方向相同,大蒜种子重心靠下,通过与种子调整凹槽碰撞,实现种子方向调整。最后调整后的大蒜种子沿弧形滑种槽进入定向器。
3.2 弧形开口定向器
利用大蒜种子芽尖进行种子方向控制,主要通过定向器和下栽鸭嘴配合完成,如图5所示。定向器主要由落种口、固定鸭嘴半件、活动鸭嘴半件和拉伸弹簧构成。固定鸭嘴半件固接在机架上,活动鸭嘴半件通过销轴和拉伸弹簧与固定鸭嘴半件连接,落种口安装在固定鸭嘴半件上方。
正常作业时,定向器在拉伸弹簧作用下闭合,蒜种经护种槽落入定向器,种子与定向器壁碰撞后静止,种子在定向器内受力方程
Fn1cosθ1+Fn2cosθ2=GFn1sinθ1=Fn2sinθ2(4)
式中:Fn1——固定鸭嘴半件对蒜种的支撑力,N;Fn2——活动鸭嘴半件对蒜种的支撑力,N;θ1——Fn1与垂直方向夹角,(°);θ2——Fn2与垂直方向夹角,(°)。
当落入定向器的蒜种芽尖向下时,芽尖部分会通过中间闭合口露出定向器,随着下栽机构的运动,栽植鸭嘴与定向器碰撞板接触,将露出定向器的芽尖夹紧产生夹紧力,因为芽尖有一定塑性,随着活动半件打开,在力距的作用下,大蒜种子翻转180°落入下栽鸭嘴中,最后定向器在弹簧作用下复位,实现种子方向调整。
杂交蒜种子芽尖弯短,为蒜种芽尖尽可能地露出定向器,定向器开口采用圆弧形设计,如图6所示。
蒜种在定向器型腔内不能横躺,以大号鳞芽尺寸为设计基准,即D2>LmaxH2>HmaxB2>BmaxL1>Lmax(5)
式中:D2——定向器接口直径,mm;H2——定向器作用区横向宽度,mm。
4 试验与分析
4.1 台架试验
大蒜播种机试验台如图7所示,该试验台由取种装置、换向器、下栽装置、电机、变频器和台架等部件组成。
根据第3部分关键部件的设计分析,影响播种效果的主要因素为大蒜鳞芽芽尖长度、作业速度以及大蒜种子的形状是否规则,由于大蒜种子的形状很难具体化,并且不同品种类型种子形状差距较大,无法具体表示,故本文将大蒜鳞芽芽尖长度和作业速度其设定为试验因素,供试品种为中号金乡杂交蒜种子,种子芽尖长度和定向速度各分为4个水平,如表2所示。
为明确二者对定向器性能的影响,以正芽率为试验指标,进行2因素4水平正交试验,正芽率q1的计算如式(6)所示,试验方案如表3所示。每组试验取種100次,记录直立进入下栽鸭嘴的大蒜种子数目,每组试验重复3次,取平均值。
q1=n1N×100%(6)
式中:N——排种数,个;n1——种子直立进入下栽鸭嘴数即正芽穴数,个。
由表3可知,蒜瓣芽尖长度对播种机正芽率影响较为明显,芽尖长度小于6 mm时,正芽率最高为76.8%,正芽效果不理想,不能满足大蒜正芽播种农艺要求;芽尖长度大于等于6 mm时,正芽率得到明显上升,均值达到87.3%,能够满足大蒜播种农艺要求;对于芽尖长度大于等于6 mm时,定向速度对正芽效果影响明显,正芽率随着定向速度的增加而降低。综上,本文研究设计的复式转动定向机构适用于大蒜种子芽尖长度大于等于6 mm,排种速度为1.2~1.6颗/s。
4.2 田间试验
4.2.1 试验材料
2021年10月5日,在山东省某农业机械有限公司种植试验基地进行田间试验。试验用地为壤土,土地松弛规整,符合大蒜种植农艺要求,试验品种为中号金乡杂交蒜,种子芽尖长度大于6 mm的比例为58%,配套拖拉机为东方红1004,如图8所示。
4.2.2 试验方法
试验参照DB 37/T 3705—2019《大蒜播种机通用技术规范》进行。为降低试验误差,每组试验重复3次,取平均值为试验结果,每组试验连续记录100个标准株距,计算单粒率p1、重播率p2、漏播率p3和正芽率q1,各试验指标的计算如式(6)~式(9)所示。
p1=m1N×100%(7)
p2=m2N×100%(8)
p3=m0N×100%(9)
式中:m0——空穴数,个;m1——单粒穴数,个;m2——重播穴数,个。
4.2.3 试验结果
当株距S=120 mm时,以单粒率、重播率、漏播率和正芽率为试验指标,对播种机性能进行试验。根据换向试验,播种机针对金乡杂交蒜行走速度设定3个水平,与1.2、1.4、1.6颗/s定向速度对应,即0.14、0.17和0.19 m/s,速度误差±3%,试验结果如表4所示。
分析表4试验结果,在所有速度范围内,机具对金乡杂交蒜的单粒率均值为93.1%,正芽率均值为85.7%。依据DB 37/T 3705—2019《大蒜播种机通用技术规范》要求,整体能够满足种植农艺要求。
在作业速度为1.4m/s、理论株距为120 mm条件下,连续测量稳定工作状态下250穴大蒜种子的播种深度,计算播深合格指数。试验结果为:平均播种深度为17.3mm,播深合格指数为91.5%,标准差为3.8mm,变异系数为7.6%,播种深度合格指数差异较小,表明播种机的播种深度一致性较好。
5 结论
1) 提出串联使用大蒜种子重心靠下和芽尖细长特征进行种子方向控制的方法,设计开发了分段式护种槽结构和弧形开口定向器,分段式护种槽结构由种子姿态梳理段A和种子调整段B组成提高大蒜种子直立进入定向器的概率,弧形开口定向器可实现芽尖长度大于6 mm种子的正芽,一套串联结构使用两种大蒜种子物理特征。
2) 田间试验结果表明,行走速度在0.14~0.19 m/s范围内,机具对金乡杂交蒜正芽率达到85%左右,整体满足大蒜播种农艺要求,初步解决了杂交蒜正芽播种难题。播种机排种装置的单粒率为93%左右,对正芽率影响显著,需进一步提高;另外,播种机整机正芽率较高时的作业速度为0.14 m/s,有待进一步提高。
参 考 文 献
[1]马招弟, 丁天娇. 中国大蒜出口贸易现状研究[J]. 农村经济与科技, 2017, 28(2): 64, 266.
[2]穆亚男. 中国大蒜国际竞争力的实证分析[J]. 国际商贸, 2013(1): 125-126.
[3]李超, 冯芮, 徐洪岑, 等. 大蒜种子分级机研究现状及展望[J]. 中国农机化学报, 42(6): 91-96.Li Chao, Feng Rui, Xu Hongcen, et al. Research status and prospect of garlic seed classifier [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(6): 91-96.
[4]金诚谦, 袁文胜, 吴崇友, 等. 大蒜播种时鳞芽朝向对大蒜生长发育影响的试验研究[J]. 农业工程学报, 2008, 24(4): 155-158.Jin Chengqian, Yuan Wensheng, Wu Chongyou, et al. Experimental study on effects of the bulbil direction on garlic growth [J]. Transactions of the Chinese Society of Agricultural Engineering, 2008, 24(4): 155-158.
[5]李华峰. 大蒜播种[P]. 中国专利: CN200820021828.5, 2009-04-15.
[6]荐世春, 赵峰, 李青, 等. 旋转式蒜瓣单粒定向取种器的研究设计[J]. 农业装备与车辆工程, 2009(2): 18-20.Jian Shichun, Zhao Feng, Li Qing, et al. Research and design on rotary garlic single-clove directional seed metering device [J]. Agricultural Equipment & Vehicle Engineering, 2009(2): 18-20.
[7]河宗佑. 大蒜播种机[P]. 中国专利: CN201380008620.3, 2014-10-22.
[8]崇峻, 张光辉, 崇璐. 大蒜播种机[P]. 中国专利: CN201520552265.2, 2015-12-30.
[9]耿爱军, 张兆磊, 宋占华, 等. 蒜种盒机械投放过程运动学分析与参数优化试验[J]. 农业工程学报, 2016, 32(5): 29-35.Geng Aijun, Zhang Zhaolei, Song Zhanhua, et al. Kinematic analysis and parameter optimized experiment of garlic box putting process [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(5): 29-35.
[10]栗晓宇, 耿爱军, 侯加林, 等. 全自动蒜种盒提取投放装置设计与试验[J]. 农业工程学报, 2017, 33(23): 32-37.Li Xiaoyu, Geng Aijun, Hou Jialin, et al. Design and experiment of full-automatic lifting and releasing device of garlic seed box [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(23): 32-37.
[11]Kim W S, Lee D H, Kim Y J, et al. Path detection for autonomous traveling in orchards using patch-based CNN [J]. Computers and Electronics in Agriculture, 2020, 175: 105620.
[12]Liu X, Hu C, Li P. Automatic segmentation of overlapped poplar seedling leaves combining Mask R-CNN and DBSCAN [J]. Computers and Electronics in Agriculture, 2020, 178: 105753.
[13]Pan L, Deng S J, Liu R H. Research on the identification of the roots of garlic base on pattern recognition [J]. Journal of Agricultural Mechanization Research, 2010, 32(5): 51-54.
[14]Shuai D, Yang L, Liu X, et al. Recognition of garlic cloves direction based on machine vision [J]. In International Workshop of Advanced Manufacturing and Automation, 2017: 447-455.
[15]方春, 孫福振, 任崇广. 基于深度学习的大蒜鳞芽朝向识别研究[J]. 计算机应用研究, 2019, 36(2): 598-600.Fang Chun, Sun Fuzhen, Ren Chongguang. Identifying bulbil direction of garlic based on deep learning [J]. Application Research of Computers, 2019, 36(2): 598-600.
[16]Geng A, Li X, Hou J, et al. Design and experiment of automatic garlic seed directing device [J]. International Journal of Agricultural and Biological Engineering, 2020, 13(6): 85-93.
[17]Li Y, Wu Y, Li T, et al. Design and experiment of adjustment device based on machine vision for garlic clove direction [J]. Computers and Electronics in Agriculture, 2020, 174: 105513.
[18]侯加林, 田林, 李天华, 等. 基于双侧图像识别的大蒜正芽及排种试验台设计与试验[J]. 农业工程学报, 2020, 36(1): 50-58.Hou Jialin, Tian Lin, Li Tianhua, et al. Design and experiment of test bench for garlic bulbil adjustment and seeding based on bilateral image identification [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(1): 50-58.
基金项目:国家自然科学基金资助项目(51805306);杭州市农业和社会发展一般项目(202203B08)
第一作者:张鹏飞,男,1990年生,浙江杭州人,硕士,讲师;研究方向为机械设计。E-mail: 527677162@qq.com
通讯作者:崔荣江,男,1983年生,山东菏泽人,博士,高级工程师;研究方向为农业装备。E-mail: cuirongjiang2009@163.com
