
丘陵山地桑叶采收机转运装置设计与试验
2024-04-27 19:28鲁磊李丽卢世博唐华林
中国农机化学报 2024年3期
鲁磊 李丽 卢世博 唐华林
摘要:针对丘陵山地桑叶采收机械缺乏、桑叶采摘收集困难、手工采摘劳动强度大等问题,研制一种丘陵山地桑叶采收机,并着重对转运装置进行设计与试验。首先分析桑葉采收机工作环境与桑叶采收流程,完成转运装置接料机构、导料机构、送袋机构的工作原理分析与结构设计计算。其次根据设计参数制作出桑叶采收机样机,在丘陵山地桑园进行转运装置试验。最后根据试验得到结论:桑叶采收机转运装置拨料器转速为80r/min,自动脱钩长度尺寸b1=25mm、宽度尺寸b2=25mm、深度尺寸b3=15mm,挂钩厚度h3=8mm时,接料机构转运过程桑叶平均转运率为95.78%,导料机构桑叶平均入袋率为97.88%,送袋机构掉袋率为1.25%,自动脱袋成功率为98.75%,桑园田间试验表明桑叶采收机转运装置可以满足桑叶采收的功能需求,验证设计的正确性及可行性。
关键词:桑叶采收机;转运装置;接料机构;导料机构;送袋机构
中图分类号:S225.93 文献标识码:A 文章编号:2095-5553 (2024) 03-0133-07
Design and experimentation of the transport mechanism for mulberry leafharvesting machine in hilly terrain
Lu Lei 1, 2, Li Li1, 2, Lu Shibo1, Tang Hualin1
(1. College of Engineering and Technology, Southwest University/Chongqing key Laboratory of AgriculturalEquipment for Hilly and Mountainous Regions, Chongqing, 400715, China; 2. Yibin Academy of SouthwestUniversity, Yibin, 644000, China)
Abstract:
Aiming at the lack of mulberry leaf harvesting machinery in hilly and mountainous areas, the difficulty of mulberry leaf harvesting and collection, and the labor intensity of manual harvesting, developing a mulberry leaf harvesting machine for hilly and mountainous terrains. and mountainous areas, and focused on the design and test of the transfer device. Firstly, analyze the working environment of the mulberry leaf harvester and the mulberry leaf harvesting process, and complete the analysis of the working principle and structural design and calculation of the receiving mechanism, guiding mechanism and bag feeding mechanism of the transfer device. Secondly, according to the design parameters, the prototype of mulberry leaf harvester is made, and the test of the transfer device is carried out in the hilly and mountainous mulberry gardens. Finally, according to the test to get the conclusion: mulberry leaf harvester transfer device toggle speed for 80 r/min, automatic decoupling length size b1=25mm, width size b2=25mm, depth size b3=15mm, when hook thickness h3=8mm, the receiving mechanism transfer process mulberry leaves average transfer rate of 95.78%, the guide mechanism mulberry leaves into the bag of the average rate of 97.88%, the bag feeding mechanism bag drop rate of 1.25%, the success rate of automatic bag removal is 98.75%. The field test in mulberry orchard shows that the mulberry leaf harvester transfer device can meet the functional requirements of mulberry leaf harvesting, which verifies the correctness and feasibility of the design.
Keywords:mulberry leaf harvesting machine; transport mechanism; receiving mechanism; guide mechanism; bag feeding mechanism
0 引言
中国是世界蚕桑商品出口大国,具有悠久蚕桑历史文化,国家出台了一系列政策促使蚕桑产业快速发展[1, 2]。桑叶是蚕桑行业前端原料,并且桑叶具有药用价值丰富[3]以及抗氧化性与抗衰老功效[4],是我国重要经济作物,但其机械化采收是目前该产业卡脖子问题[5]。针对丘陵山地桑叶采收机械缺乏、人工劳动强度大、采收作业成本高的问题,其中桑叶采收机的转运装置是桑叶采收机的重要组成成分,但每株桑树枝条多,采摘收集困难,因此研究丘陵山地桑叶自动采收机转运装置对桑叶采摘机械化具有重要意义。
目前对桑叶采收机的研究较少,国外设计了一种适合桑枝的茎叶分离器[6];国内提出了自动往复式、摇杆式、具有定位装置的桑叶采摘机[7, 8];以上研究应用于桑叶采摘,并未在收集部分做出相关研究。针对桑园环境研究了复杂自然环境下桑叶采摘枝干的识别方法[9],为桑叶采摘的识别与收集展开了研究,在此基础上桑叶采摘的自动定位变为现实。Fragapane等[10]主要将转运装置运用到大型产线实现生产效率的提高,较少运用到农业机械上。徐勤超等[11]提出了一种间歇式柑橘育苗钵机械装填转运机;刘宏新等[12]研发了玉米播种机转运平台,解决播种机作业转场困难的问题;王相友等[13]研究了输送线速度、引流板角度、装袋高度等对马铃薯的装袋装置的影响,上述转运机构为桑叶转运装置的研究提供不同方法。郑占贺等[14]研究了一种连杆式自动撑袋装置。根据不同采收装置研究为桑叶采摘与收集装袋相结合提供了思路[1520]。
以上研究并没有将桑叶收集装袋与桑叶采摘相结合,针对上述研究现状,结合丘陵山地桑园桑叶特殊作业环境、桑叶尺寸大小等综合因素,研制一种符合桑叶采收机完成桑叶采收的转运装置,对关键部件进行理论分析与结构设计,并制作出样机完成转运装置试验与桑园试验,验证设计的可行性与正确性,为丘陵山地桑叶采收机收集技术与机具研究提供方法与技术理论支撑。
1 整机结构与送料装置工作原理
1.1 整机结构
我国大部分桑园处于丘陵山地地区,本文对重庆市某桑园基地,进行前期测量,得到该地区桑树间距2m,坡度为0~25°,因此采用履带式底盘作为桑叶自动采收机的行驶工具。
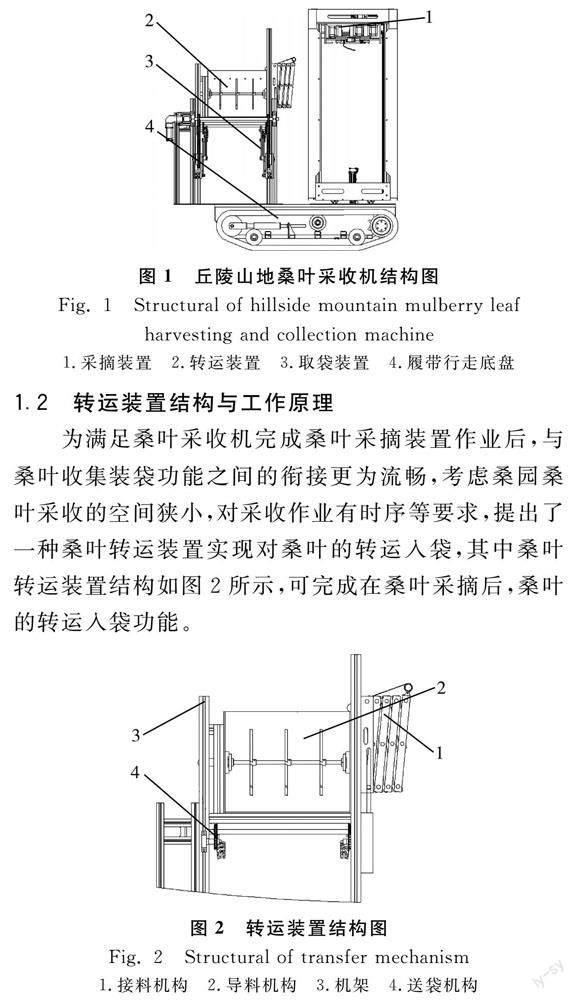
根据该地区条件,完成桑叶采摘机的方案设计,丘陵山地桑叶采收机结构如图1所示,整体装置主要由桑叶采摘装置、桑叶转运装置、桑叶取袋装置、履带行走底盘组成。
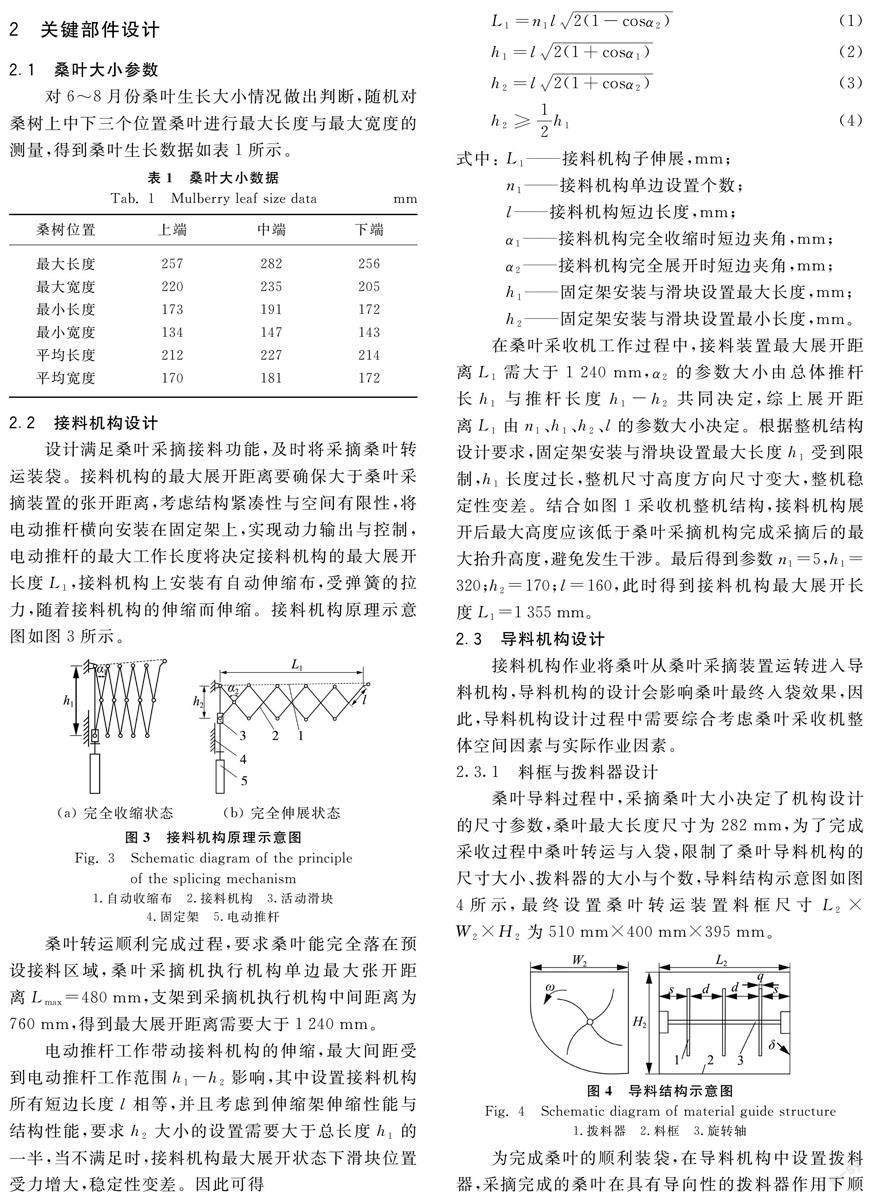
为满足桑叶采收机完成桑叶采摘装置作业后,与桑叶收集装袋功能之间的衔接更为流畅,考虑桑园桑叶采收的空间狭小,对采收作业有时序等要求,提出了一种桑叶转运装置实现对桑叶的转运入袋,其中桑叶转运装置结构如图2所示,可完成在桑叶采摘后,桑叶的转运入袋功能。
接料机构固定在机架上,通过推杆作用实现伸缩,在接料机构伸展时完成桑叶接取,收缩实现桑叶转运入导料机构。导料机构上设置有拨料器,沿着顺势方向旋转,对转运桑叶实现拨料入袋。送袋机构上袋盘与自动脱袋挂钩在链轮链条作用下完成有序编织袋的供给。各机构联合作业,实现桑叶采收机桑叶的转运功能。
2 关键部件设计
2.1 桑叶大小参数
对6~8月份桑叶生长大小情况做出判断,随机对桑树上中下三个位置桑叶进行最大长度与最大宽度的测量,得到桑叶生长数据如表1所示。
2.2 接料机构设计
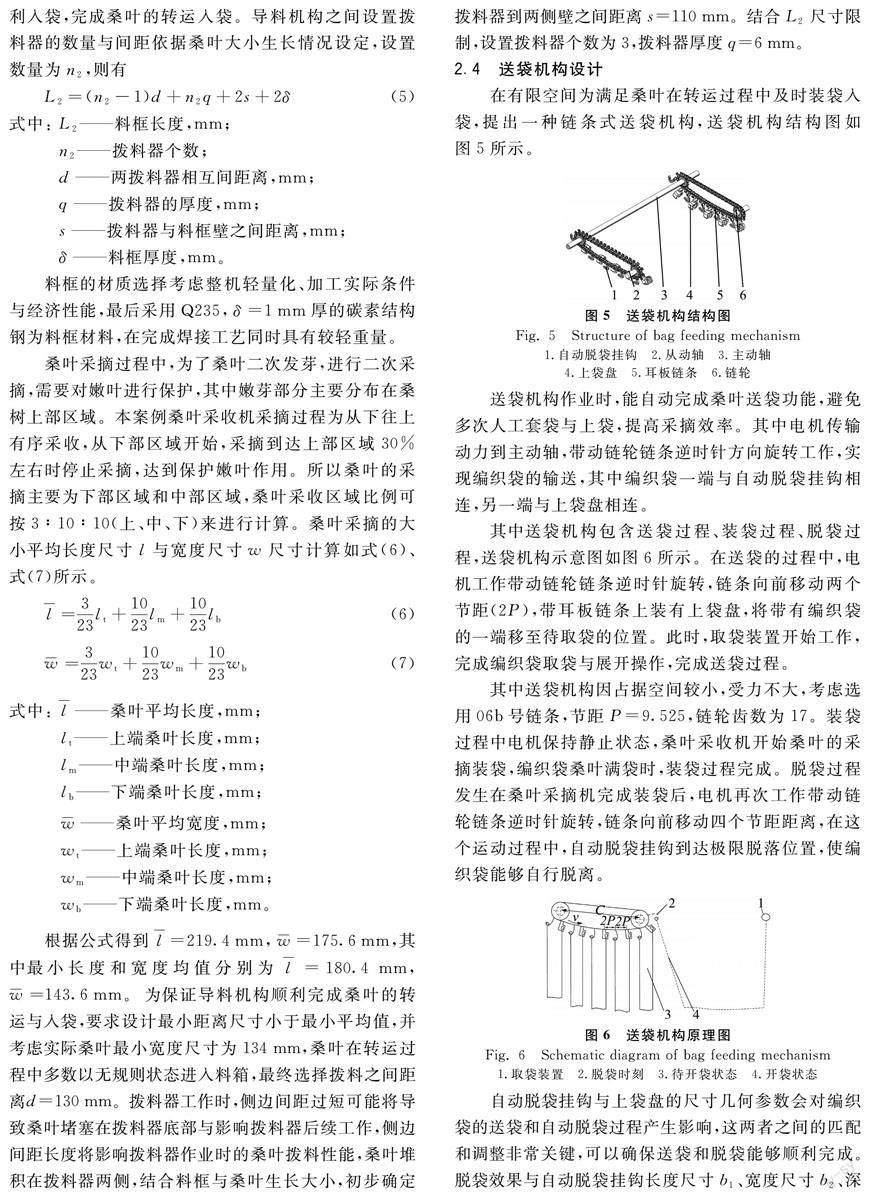
设计满足桑叶采摘接料功能,及时将采摘桑叶转运装袋。接料机构的最大展开距离要确保大于桑叶采摘装置的张开距离,考虑结构紧凑性与空间有限性,将电动推杆横向安装在固定架上,实现动力输出与控制,电动推杆的最大工作長度将决定接料机构的最大展开长度L1,接料机构上安装有自动伸缩布,受弹簧的拉力,随着接料机构的伸缩而伸缩。接料机构原理示意图如图3所示。
桑叶转运顺利完成过程,要求桑叶能完全落在预设接料区域,桑叶采摘机执行机构单边最大张开距离Lmax=480mm,支架到采摘机执行机构中间距离为760mm,得到最大展开距离需要大于1240mm。
电动推杆工作带动接料机构的伸缩,最大间距受到电动推杆工作范围h1-h2影响,其中设置接料机构所有短边长度l相等,并且考虑到伸缩架伸缩性能与结构性能,要求h2大小的设置需要大于总长度h1的一半,当不满足时,接料机构最大展开状态下滑块位置受力增大,稳定性变差。因此可得
L1=n1l2(1-cosα2)(1)
h1=l2(1+cosα1)(2)
h2=l2(1+cosα2)(3)
h2≥12h1(4)
式中:L1——接料机构子伸展,mm;n1——接料机构单边设置个数;l——接料机构短边长度,mm;α1——接料机构完全收缩时短边夹角,mm;α2——接料机构完全展开时短边夹角,mm;h1——固定架安装与滑块设置最大长度,mm;h2——固定架安装与滑块设置最小长度,mm。
在桑叶采收机工作过程中,接料装置最大展开距离L1需大于1240mm,α2的参数大小由总体推杆长h1与推杆长度h1-h2共同决定,综上展开距离L1由n1、h1、h2、l的参数大小决定。根据整机结构设计要求,固定架安装与滑块设置最大长度h1受到限制,h1长度过长,整机尺寸高度方向尺寸变大,整机稳定性变差。结合如图1采收机整机结构,接料机构展开后最大高度应该低于桑叶采摘机构完成采摘后的最大抬升高度,避免发生干涉。最后得到参数n1=5,h1=320;h2=170;l=160,此时得到接料机构最大展开长度L1=1355mm。
2.3 导料机构设计
接料机构作业将桑叶从桑叶采摘装置运转进入导料机构,导料机构的设计会影响桑叶最终入袋效果,因此,导料机构设计过程中需要综合考虑桑叶采收机整体空间因素与实际作业因素。
2.3.1 料框与拨料器设计
桑叶导料过程中,采摘桑叶大小决定了机构设计的尺寸参数,桑叶最大长度尺寸为282mm,为了完成采收过程中桑叶转运与入袋,限制了桑叶导料机构的尺寸大小、拨料器的大小与个数,导料结构示意图如图4所示,最终设置桑叶转运装置料框尺寸L2×W2×H2为510mm×400mm×395mm。
为完成桑叶的顺利装袋,在导料机构中设置拨料器,采摘完成的桑叶在具有导向性的拨料器作用下顺利入袋,完成桑叶的转运入袋。导料机构之间设置拨料器的数量与间距依据桑叶大小生长情况设定,设置数量为n2,则有
L2=(n2-1)d+n2q+2s+2δ(5)
式中:L2——料框长度,mm;n2——拨料器个数;d——两拨料器相互间距离,mm;q——拨料器的厚度,mm;s——拨料器与料框壁之间距离,mm;δ——料框厚度,mm。
料框的材质选择考虑整机轻量化、加工实际条件与经济性能,最后采用Q235,δ=1mm厚的碳素结构钢为料框材料,在完成焊接工艺同时具有较轻重量。
桑叶采摘过程中,为了桑叶二次发芽,进行二次采摘,需要对嫩叶进行保护,其中嫩芽部分主要分布在桑树上部区域。本案例桑叶采收机采摘过程为从下往上有序采收,从下部区域开始,采摘到达上部区域30%左右时停止采摘,达到保护嫩叶作用。所以桑叶的采摘主要为下部区域和中部区域,桑叶采收区域比例可按3∶10∶10(上、中、下)来进行计算。桑叶采摘的大小平均长度尺寸l与宽度尺寸w尺寸计算如式(6)、式(7)所示。
l-=323lt+1023lm+1023lb(6)
w-=323wt+1023wm+1023wb(7)
式中:l-——桑叶平均长度,mm;lt——上端桑叶长度,mm;lm——中端桑叶长度,mm;lb——下端桑叶长度,mm;w-——桑叶平均宽度,mm;wt——上端桑叶长度,mm;wm——中端桑叶长度,mm;wb——下端桑叶长度,mm。
根据公式得到l-=219.4mm,w-=175.6mm,其中最小长度和宽度均值分别为l-=180.4mm,w-=143.6mm。为保证导料机构顺利完成桑叶的转运与入袋,要求设计最小距离尺寸小于最小平均值,并考虑实际桑叶最小宽度尺寸为134mm,桑叶在转运过程中多数以无规则状态进入料箱,最终选择拨料之间距离d=130mm。拨料器工作时,侧边间距过短可能将导致桑叶堵塞在拨料器底部与影响拨料器后续工作,侧边间距长度将影响拨料器作业时的桑叶拨料性能,桑叶堆积在拨料器两侧,结合料框与桑叶生长大小,初步确定拨料器到两侧壁之间距离s=110mm。结合L2尺寸限制,设置拨料器个数为3,拨料器厚度q=6mm。
2.4 送袋机构设计
在有限空间为满足桑叶在转运过程中及时装袋入袋,提出一种链条式送袋机构,送袋机构结构图如图5所示。
送袋机构作业时,能自动完成桑叶送袋功能,避免多次人工套袋与上袋,提高采摘效率。其中电机传输动力到主动轴,带动链轮链条逆时针方向旋转工作,实现编织袋的输送,其中编织袋一端与自动脱袋挂钩相连,另一端与上袋盘相连。
其中送袋机构包含送袋过程、装袋过程、脱袋过程,送袋机构示意图如图6所示。在送袋的过程中,电机工作带动链轮链条逆时针旋转,链条向前移动两个节距(2P),带耳板链条上装有上袋盘,将带有编织袋的一端移至待取袋的位置。此时,取袋装置开始工作,完成编织袋取袋与展开操作,完成送袋过程。
其中送袋机构因占据空间较小,受力不大,考虑选用06b号链条,节距P=9.525,链轮齿数为17。装袋过程中电机保持静止状态,桑葉采收机开始桑叶的采摘装袋,编织袋桑叶满袋时,装袋过程完成。脱袋过程发生在桑叶采摘机完成装袋后,电机再次工作带动链轮链条逆时针旋转,链条向前移动四个节距距离,在这个运动过程中,自动脱袋挂钩到达极限脱落位置,使编织袋能够自行脱离。
自动脱袋挂钩与上袋盘的尺寸几何参数会对编织袋的送袋和自动脱袋过程产生影响,这两者之间的匹配和调整非常关键,可以确保送袋和脱袋能够顺利完成。脱袋效果与自动脱袋挂钩长度尺寸b1、宽度尺寸b2、深度尺寸b3、挂钩厚度h3的参数相关,取袋效果与上袋盘内圆直径r1的参数相关,其结构示意图如图7所示。
送袋机构自动脱袋挂钩参数b1、b2、b3参数的不同配置将影响编织袋自动脱落效果,为了探寻自动脱袋挂钩自动脱袋效果,对其进行前期预实验分析。因为桑叶采收机空间限制,得到b1距离不能大于25mm,否则易造成运动过程中的干涉,过小影响桑叶袋挂带性能;b2决定自动脱袋挂钩与袋口横跨幅度,b2过小时,宽距变小,经测试小于25mm时效果欠佳;b3决定自动脱袋挂钩与袋口嵌入深度,深度太大不容易脱落,太小则不能将袋口成功挂住;h3为挂钩厚度,将影响编织袋与挂钩内陷深度与整体强度。上袋盘参数r1决定磁吸石最大外径,上袋盘参数r1选择过大时在送袋机构运行过程中易于料箱发生干涉,过小时磁吸石最大外径小,与取袋装置电磁吸铁作用面积小,影响送袋效果。
3 样机试验
完成桑叶采收机转运装置设计后,加工出桑叶采收物理样机,对样机进行试验验证。
3.1 接料机构试验
桑叶采收机采摘机构完成桑叶采摘作业,后续接料机构需对完成采摘的桑叶承接转运。为验证桑叶接料机构桑叶转运功能,进行转运机构验证试验。其中通过分析桑叶采摘过程,随机向桑叶接料机构输送固定数量桑叶实现控制变量过程,以桑叶成功运转率为指标,判断机构设计的正确性,桑叶成功运转率计算如式(8)所示。
P=Ne-Nf-NrNe×100%(8)
式中:P——运转率,%;Ne——转运实验桑叶试验数量;Nf——转运实验桑叶掉落数量;Nr——转运实验桑叶滞留数量。
试验结果如表2所示。在接料机构伸缩向料框转运采摘的桑叶过程中,部分桑叶沿接料机构边缘位置滑落,原因在于桑叶采摘完成后,桑叶随机落入接料机构中,处于接料机构边缘的桑叶在接料机构回缩过程中靠边掉落。并且存在一定桑叶滞留接料机构上,原因在于接料机构回缩过程,底部桑叶与自动伸缩布发生粘连,导致较少桑叶滞留接料机构上。根据试验结果可得桑叶转运过程平均转运率为95.78%,符合桑叶转运设计要求。
3.2 导料机构试验
接料机构完成工作后,桑叶进入导料机构,在拨料器作用下,桑叶掉入编织袋,为探究导料机构将桑叶转运入袋的功能,以入袋率为指标进行导料机构试验验证,其中入袋率是桑叶成功在导料机构作用下转运入袋的概率。
拨料器工作转速过快会将桑叶抛出预定入袋区域,所以对拨料器进行转速预试验,得到在转速为80r/min时桑叶能在拨料器作用下成功入袋。在取袋开袋试验中得到编织袋种类为550×550×550方形编织袋、上袋盘r1决定的磁吸石的尺寸大小为20时,开袋取袋效果最佳,所以本文以拨料器转速为80r/min、编织袋种类为550×550×550方形、磁吸石的尺寸大小为20进行试验验证,试验结果如表3所示。结果表明,导料机构桑叶平均入袋率为97.88%,满足桑叶导料机构设计要求。
3.3 送袋机构自动脱袋挂钩脱钩试验
根据条件分析,b1越大时挂袋性能越好,最大上限为25mm,h3设计时需考虑链条耳板外侧宽度,测量得到耳板外侧宽度大小为10mm,为避免与链条干涉,h3应小于10mm;h3过小会导致自动脫袋挂钩强度不够,则最终确定b1为25mm,h3为8mm。在三维软件中对b1、b2进行评估分析,考虑模型的可建立性与功能性,对b1、b2进行不同搭配试验,如表4所示。
探究不同自动脱袋挂钩组合下的自动脱袋效果与挂袋效果,以成功自动脱袋率与掉袋率为指标,成功脱袋率越多、掉袋率越低,自动脱袋挂钩的效果越好。掉袋率与自动脱袋率分别进行80次试验,试验结果如表5所示,根据试验结果最终确定自动脱钩参数为b1=25mm、b2=25mm、b3=15mm,h3=8mm。
3.4 桑叶采收机转运桑园试验
试验在重庆市合川区某桑园基地,桑园行宽2m,坡度0°~25°,选用农桑14号品种进行试验,桑叶平均长度大小l-为219.4mm,平均宽度大小w-为175.6mm,样机试验如图8所示。
对桑叶采收机进行丘陵山地桑园采收试验,由试验可知,桑叶采收机转运装置能完成桑叶采摘转运入袋,机器能够流畅完成桑叶的采收作业,整机在桑园运行稳定,验证了桑叶转运装置设计的正确性及可行性。
4 结论
1) 针对丘陵山地桑园地理条件与农桑14号桑叶大小,提出一种桑叶采收机转运装置,可实现桑叶采收过程中的转运、桑叶入袋、送袋一体化作业,有效降低劳动强度,提高桑园桑叶采摘效率。
2) 完成对桑叶采收机转运装置的接料机构、导料机构、送袋机构的设计,并根据实际要求与预试验完成关键参数的确定,最终得到接料机构最大伸展距离L1=1355mm、导料机构拨料器个数n1=3,拨料器厚度q=6mm。通过验证试验,得到接料机构平均转运率为95.78%;拨料器转速为80r/min时桑叶拨料平均入袋率为97.88%;在自动脱袋挂钩长度、宽度、深度参数b1=25mm、b2=25mm、b3=15mm,挂钩厚度h3=8mm时,掉袋率为1.25%,自动脱袋成功率为98.75%,桑园田间试验运行稳定,满足桑园桑叶采收转运要求。试验表明桑叶采收机转运装置可以满足桑叶采收的功能需求,验证了设计的正确性及可行性。
参 考 文 献
[1]商务部关于茧丝绸行业“十四五”发展的指导意见[J]. 北方蚕业, 2021, 42(3): 56-60.
[2]六部门印发《蚕桑丝绸产业高质量发展行动计划(2021—2025年)》[J]. 北方蚕业, 2020, 41(4): 60.
[3]李来成, 张士凯, 许方舟, 等. 桑叶综合利用的研究进展[J]. 食品工业科技, 2022, 43(2): 397-404.Li Laicheng, Zhang Shikai, Xu Fangzhou, et al. Research progress of mulberry leaf comprehensive utilization[J]. Science and Technology of Food Industry, 2022, 43(2): 397-404.
[4]Wen Lingrong, Shi Dingding, Zhou Ting, et al. Identification of two novel prenylated flavonoids in mulberry leaf and their bioactivities [J]. Food Chemistry, 2020: 126236.
[5]马莹. 我国规模化蚕桑基地建设现状及发展对策研究[D]. 镇江: 江苏科技大学, 2021Ma Ying. Research on the current situation and development countermeasures of large scale sericulture base construction in China [D]. Zhenjiang: Jiangsu University of Science and Technology, 2021.
[6]Liang Kunyong, Wang Bo, Li Riquan, et al. Design of rotating and striking separator for mulberry stems and leaves [J]. Journal of Physics: Conference Series, 2023.
[7]闫鑫. 往复式桑叶采摘机结构设计及各机构速度优化匹配研究[D]. 柳州: 广西科技大学, 2015.Yan Xin. Design of reciprocating device of picking mulberry leaves and the optimization and matching of its velocity [D]. Liuzhou: Guangxi University of Science and Technology, 2015.
[8]柳怡成. 摇杆式桑叶采摘机的运动动力学仿真与优化[D]. 柳州: 广西科技大学, 2020.Liu Yicheng. Motion dynamic analysis and optimization of the rocker type mulberry picking machine [D]. Liuzhou:Guangxi University of Science and Technology, 2020.
[9]任浩, 李丽, 卢世博, 等. 基于深度学习的复杂自然环境下桑树枝干识别方法[J]. 中国农机化学报, 2023, 44(2):182-188.Ren Hao, Li Li, Lu Shibo, et al. Identification method of mulberry tree branches in complex natural environments based on deep learning[J]. Journal of Chinese Agricultural Mechanization, 2023, 44(2): 182-188.
[10]Fragapane G, Ivanov D, Peron M, et al. Increasing flexibility and productivity in Industry 4.0 production networks with autonomous mobile robots and smart intralogistics [J]. Annals of Operations Research, 2022, 308(6): 125-143.
[11]徐勤超, 李善军, 张衍林, 等. 柑橘育苗钵装填转运机设计与试验[J]. 农业工程学报, 2020, 36(18): 66-72.Xu Qinchao, Li Shanjun, Zhang Yanlin, et al. Design and test of seedling pot filling and transporting machine for citrus[J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(18): 66-72.
[12]劉宏新, 尹林伟, 解勇涛, 等. 地轮前置式中型免耕覆秸垄作玉米播种机转运平台研制[J]. 农业工程学报, 2022, 38(10): 10-18.Liu Hongxin, Yin Linwei, Xie Yongtao, et al. Development of the transfer platform with ground wheel in front for the medium-sized no-tillage stalk mulching ridge corn planter[J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(10): 10-18.
[13]王相友, 任加意, 吕丹阳, 等. 马铃薯定量装袋装置设计与试验[J]. 农业机械学报, 2022, 53(10): 156-166.Wang Xiangyou, Ren Jiayi, Lü Danyang, et al. Design and test of potato quantitative weight bagging device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(10): 156-166.
[14]郑占贺, 王莹, 任文营, 等. 青饲机青贮块间歇型自动撑袋机构的设计与优化[J]. 包装工程, 2023, 44(3):179-186.Zheng Zhanhe, Wang Ying, Ren Wenying, et al. Design and optimization of intermittent automatic bag-supporting mechanism for silage block in fodder machine[J]. Packging Engineering, 2023, 44(3): 179-186.
[15]廖凯, 古全元, 高自成, 等. 芦苇笋采收机研制[J]. 农业工程学报, 2021, 37(15): 20-30.Liao Kai, Gu Quanyuan, Gao Zicheng, et al. Development of reed shoot harvesters [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(15): 20-30.
[16]张振国, 邢振宇, 杨双平, 等. 圆弧渐进式红花丝采收装置设计与试验[J]. 农业工程学报, 2022, 38(17): 10-21.Zhang Zhenguo, Xing Zhenyu, Yang Shuangping, et al. Design and experiments of the circular arc progressive type harvester for the safflower filaments[J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(17): 10-21.
[17]朱兴亮, 袁盼盼, 尤佳, 等. 基于平面运动的酿酒葡萄采收装置设计与试验[J]. 中国农机化学报, 2022, 43(10): 1-6.Zhu Xingliang, Yuan Panpan, You Jia, et al. Design and experiment of wine grape harvesting device based on plane motion[J]. Journal of Chinese Agricultural Mechanization, 2022, 43(10): 1-6.
[18]刘天湖, 刘伟, 曾霆俊, 等. 多柔性指滚筒菠萝采收机构工作原理及设计[J]. 农业工程学报, 2022, 38(8): 21-26.Liu Tianhu, Liu Wei, Zeng Tingjun, et al. Working principle and design of the multi-flexible fingered roller pineapple harvesting mechanism [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(8): 21-26.
[19]王超超, 韓长杰, 尤佳, 等.食葵采收台凸轮机构设计与试验[J]. 中国农机化学报, 2019, 40(4): 7-12.Wang Chaochao, Han Changiie, You Jia, et al. Design and experiment on the cam mechanism for collecting station of edible sunflower[J]. Journal of Chinese Agricultural Mechanization, 2019, 40(4): 7-12.
[20]吴稳, 胡良龙, 王公仆, 等. 电动叶菜多功能采收机切割机构设计与仿真优化[J]. 中国农机化学报, 2023, 44(4): 7-16, 24.Wu Wen, Hu Lianglong, Wang Gongpu, et al. Design and simulation optimization of cutting mechanism of electric leaf vegetable multi functional harvester [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(4):7-16, 24.
基金项目:重庆市杰出青年科学基金项目(2022NSCQ—JQX0030);宜宾市双城协议保障科研经费科技项目计划(XNDX2022020015);“西南大学先导计划”2023年度自然科学领域项目(Swu—XDJH202302)
第一作者:鲁磊,男,1998年生,四川泸州人,硕士研究生;研究方向为智能农业装备。E-mail: 507719784@qq.com
通讯作者:李丽,女,1982年生,重庆人,博士,教授,博导;研究方向为智能农业装备及应用示范。E-mail: cqulily@163.com
