
新能源农机用双永磁游标电机的模型预测电流控制
2024-04-30 13:14黄志凡罗向平徐艳婷
安徽农业科学 2024年7期
黄志凡 罗向平 徐艳婷
摘要模块化双永磁游标电机兼具高转矩密度和低铁耗,适用于低速大转矩的直驱应用领域。针对新能源农机用模块化双永磁游标电机控制系统存在的转矩脉动大、电流谐波多和转速波动大等问题,提出一种基于改进式模型预测电流控制策略。相比于传统模型预测电流控制,提出的控制策略采用双矢量模型预测电流控制,在每个控制周期内可同时选择2个任意电压矢量组合作用,扩大了电压矢量的选择和幅值调节范围,可进行更准确的电流控制。同时,考虑系统延迟,在预测控制中加入电流延迟补偿环节。仿真结果表明,所提的控制策略可有效减小转矩脉动、电流谐波和转速波动,提升系统的控制性能。
关键词模块化双永磁游标电机;双矢量;模型预测控制;延迟补偿;新能源农机
中图分类号TM351 文献标识码A 文章编号05176611(2024)07020005
doi:10.3969/j.issn.05176611.2024.07.047
Model Predictive Current Control of Double Permanent Magnet Vernier Motor for New Energy Agricultural Machinery
HUANG Zhi-fan, LUO Xiang-ping, XU Yan-ting
(Zhejiang Jiaxing Digital City Laboratory Co., Ltd., Jiaxing, Zhejiang 314000)
AbstractModular dual permanent magnet vernier machine incorporate the merits of high torque density and low iron loss, suitable for low-speed high-torque applications. Due to high torque ripples, high current harmonics and high speed fluctuations in control system of modular dual permanent magnet machine for new energy tractor, an improved model predictive current control strategy is proposed. Compared with conventional model predictive current control, mode predictive current control based on dual vector is adopted in proposed strategy, double arbitrary voltage vector can be selected to operate simultaneously in each control cycle that extends selection range of voltage vector and adjustment range of amplitude, which can realize more accurate current control. Meanwhile, considering system delay, current delay compensation is added to predictive control. The simulation results showed that proposed control strategy can effectively reduce torque ripples, current harmonics and speed fluctuations, thus improving control performance of the system.
Key wordsModular dual permanent magnet vernier machine;Double vector;Model predictive control;Delay compensation;New energy agricultural machinery
我國是农业大国,农业是立国之本,强国之基,农业的发展直接关系到社会的稳定与国家的长治久安。国家高度重视“三农”工作,并提出乡村振兴、农业现代化的发展规划。实现农业现代化,关键是实现农业科技的现代化[15]。目前,在农业生产中使用的农业装备主要有拖拉机、收割机、播种机等。改革开放以来,我国科技发展迅速,农业装备的机械化程度也在不断提高,但目前农业机械设备传动机构复杂,转化效率低、制造成本高,在作业生产中易出现故障和安全问题,此外,由于采用以化石燃料为基础的柴油机为主要动力,还存在排气污染、噪声污染和能源消耗的问题。同时,随着化石能源的不断枯竭,以及全球气候的不断恶化,“碳中和”“碳达峰”政策被提出。以电能、电机和电驱为主的新能源技术在农业机械装备上的应用可实现环保、无污染、绿色、高效的可持续农业生产发展[6],在农业生产领域有较大的应用前景。电机及其控制系统作为新能源农机的核心模块,尤为关键。近年来,永磁游标电机因其低速大转矩的特点成为国内外学者的研究热点[710]。定子模块化双永磁游标(MDPMV)电机是一种新型永磁游标电机,其定子和转子均嵌入永磁体,通过双向磁场调制,大大提升了电机的电磁转矩密度,且采用定子模块化结构设计,可有效降低电机的铁耗,兼具高转矩密度和低铁耗,在数控机床、机器人、风力发电、石油开采、新能源农机等高性能要求的直驱领域有较好的应用前景[1114]。当前,针对MDPMV电机的研究主要集中在电机结构、运行准则、静态性能,较少研究其动态运行性能,尤其是高性能的电流控制。
有限集模型预测控制(finite control set model predictive control,FCSMPC)是运动控制领域的一种新型控制策略[1517],充分考虑了开关器件的离散特性,具有能处理多变量、多约束条件、鲁棒性强、结构简单和动态性能好等优点。但FCSMPC也有其局限性,由于每个控制周期仅有单个矢量作用,故传统MPC的稳态性能较差。为了改善传统MPC的不足,玉亮等[1819]将占空比调制引入MPC,在一定程度上提升了系统的稳态性能,但第2个作用电压矢量为零矢量,难以保证作用的参考电压为全局最优。嵇越等[20]采用双矢量MPC,改善控制系统的稳态性能,但未考虑系统延迟对控制性能的影响,当计算量增大时,系统性能将会受到影响。
笔者以具有多变量、强耦合、多约束的新型MDPMV电机为控制对象,对其电流进行直接控制,采用模型预测电流控制(model predictive current control,MPCC),针对传统MPCC系统存在的转矩脉动大、电流谐波多和转速波动大等问题,提出一种基于双矢量的MPCC控制方法,每个控制周期选用2个任意矢量,并针对系统延迟,加入电流延迟补偿环节,仿真结果验证了该算法的有效性。
1MDPMV电机及其数学模型
1.1MDPMV电机结构
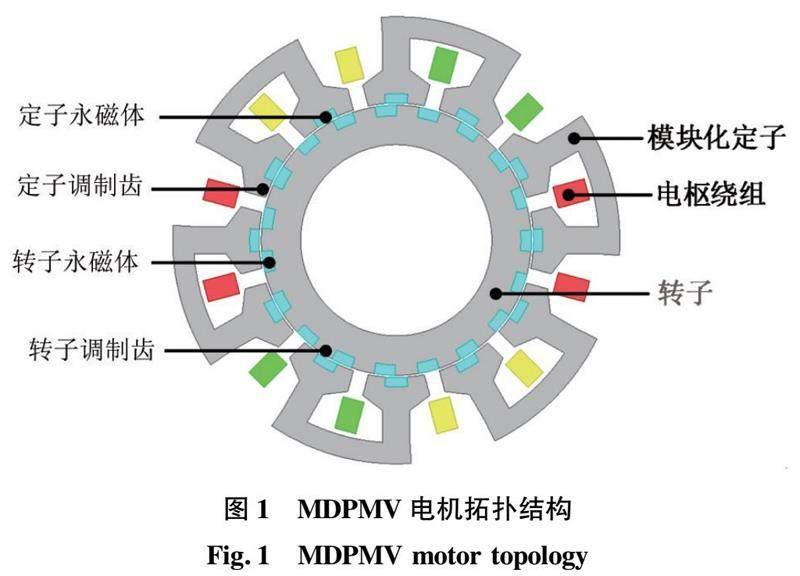
图1为新型三相MDPMV电机拓扑结构图,该电机由模块化定子、电枢绕组、转子、气隙以及定转子双侧永磁体等组成。由图1可知,相比于传统永磁游标电机,MDPMV电机定子虚齿与转子槽匀嵌入永磁体,定子凸机齿和转子凸机齿均可作为调制齿参与磁场调制,双向磁场调制效应大大丰富了气隙谐波,增加了有效输出谐波含量,提升了电机的转矩密度。移除部分定子轭部形成的模块化定子增加了电机低次谐波磁路的磁阻,对低次谐波含量有较好的抑制作用,可有效降低电机的铁耗。
图2为电枢电流励磁时,常规模型和定子模块化模型的2台双永磁游标(DPMV)电机的电枢反应磁密分布对比。从图2可以看出,采用定子模块化结构的DPMV电机明显具有更低的电枢反应磁密。由于定子模块化结构能有效抑制电机电枢反应磁场的1次谐波,因此电机的电枢铁耗可有效减小。
常规模型和定子模块化模型的2台DPMV电机的磁场谐波频谱对比如图3所示。由图3可知,当电机运行时,定子模块化结构在对电机主要工作谐波保持不变的基础上,对产生铁耗的1次谐波分量具有明显的抑制作用,根据DPMV电机谐波铁耗产生的数学模型,
采用定子模块化结构的DPMV电机可有效降低电机的铁耗,进而降低电机工作时的温度。
图4为三相MDPMV电机在速度为600 r/min下的三相空载反电动势(backEMF)。从图4可以看出,三相反电动势相位互差120°,波形幅值对称,正弦度较高,为该电机实施三相正弦波控制策略奠定了良好的基础。
1.2数学模型
DPMV电机在d、q两相同步坐标下的电流状态方程为
diddt=1Ld(Rsid+ud+Lqiqωe)diqdt=1Lq(Rsiq+uqLdidωeψfωe)(1)
式(1)中,id、iq分别为d、q轴电流,ud、uq分别为d、q轴电压,Ld、Lq分别为d、q轴电感,Rs为定子电阻,ψf为永磁体磁链,ωe为电机的电角速度。
对式(1)向前一阶差分进行离散化,可将电流方程转化为
id(k+1)=id(k)+TsLd[Rsid(k)+ud(k)+ed]iq(k+1)=iq(k)+TsLq[Rsiq(k)+uq(k)+eq] (2)
ed(k)=Lqiq(k)ωe(k)eq(k)=ωe(k)(Ldid(k)+ψf)(3)
式(2)、(3)中,Ts为采样时间,ed(k)、eq(k)分別为d、q轴反电动势在k时刻的采样值。
DPMV电机的机械运动方程为
TeTL=Jdωrdt+Bωr(4)
式(4)中,Te为电机的电磁转矩,TL为负载转矩,J为电机转动惯量,ωr为电机机械角速度,B为黏滞摩擦系数。
2改进式双矢量MPCC算法
基于开关器件和电机数学模型的离散化,FCSMPC算法主要由预测模型、代价函数和遍历寻优等模块组成。其中,由于该研究以电流为控制对象,可选择由式(2)作为预测模型。为了实现最优控制,通常需定义一个能够描述不同电压矢量作用效果的指标,即代价函数g。通过遍历所有候选矢量作用后的代价函数值,选取代价函数值最小的矢量作为下一时刻的作用量,实现最佳控制。
然而,FCSMPC算法在实际运用中,由于计算量较大导致采样和控制不完全同步,造成系统延迟,无法达到理想的控制效果。针对系统延迟,一种有效的补偿方案为在k时刻提前预测k+1时刻控制量的外推法。据此,可由式(2)向前外推一步得到延迟补偿后的代价函数为
g=|i*didp(k+2)|2+|i*qiqp(k+2)|2(5)
式(5)中,id*、iq*分别为d、q轴电流矢量的参考值,idp(k+2)、iqp(k+2)分别为k+2时刻d、q轴电流矢量的预测值。
传统MPCC由于在一个控制周期内仅通过单矢量进行控制,由于仅有8个电压矢量(6个有效电压矢量、2个零矢量)且幅值大小固定,因此可将传统MPCC理解为当前时刻局部条件下的最优控制,而非全局最优控制。故传统MPCC特别是当控制周期较长时,电机控制的稳态性能较差,转矩、电流和转速波动较大。
改进式双矢量MPCC采用占空比调制技术,通过选择2个使代价函数最小化的基本电压矢量以及不同占空比,组合成参考电压矢量,作用于开关器件,进行电机控制,来提升电机的控制性能。传统MPCC和双矢量MPCC电压矢量选择范围对比如图5所示。从图5a可以看出,传统MPCC电压矢量选择范围仅为8个幅值和方向固定的基本电压矢量。从图5b可以看出,双矢量MPCC将2个任意电压矢量进行组合,大大增加了合成电压矢量选择范围,包括外接六边形和2个内接三角形上的所有虚线,可以进行更精准、更灵活的控制。
双矢量MPCC算法通过将2个电压矢量以不同占空比组合起来合成参考电压矢量,关键在于如何确定占空比的大小。通过式(1)可得到施加任意电压矢量ux下对应的电流矢量变化率δx为
δdx=1Ld(Rsid+udx+Lqiqωe)δqx=1Lq(Rsiq+uqxLdidωeψfωe)(6)
假设第1个作用电压矢量的占空比为dp1,δ1、δ2分别为作用的电压矢量u1和u2产生的电流变化率,经过2个电压矢量组合作用,可得k+2时刻电流矢量的预测值为
isp(k+2)=isp(k+1)+δ1dp1Ts+δ2(1dp1)Ts(7)
式(7)中,isp(k+2)为k+2时刻的电流矢量预测值,其分量为d、q轴电流矢量。
通过求解方程g/dp1=0计算代价函数的极小值,可求解出占空比dp1为
dp1=(δ1δ2)[is*(k+1)isp(k+1)δ2Ts]|δ1δ2|2Ts(8)
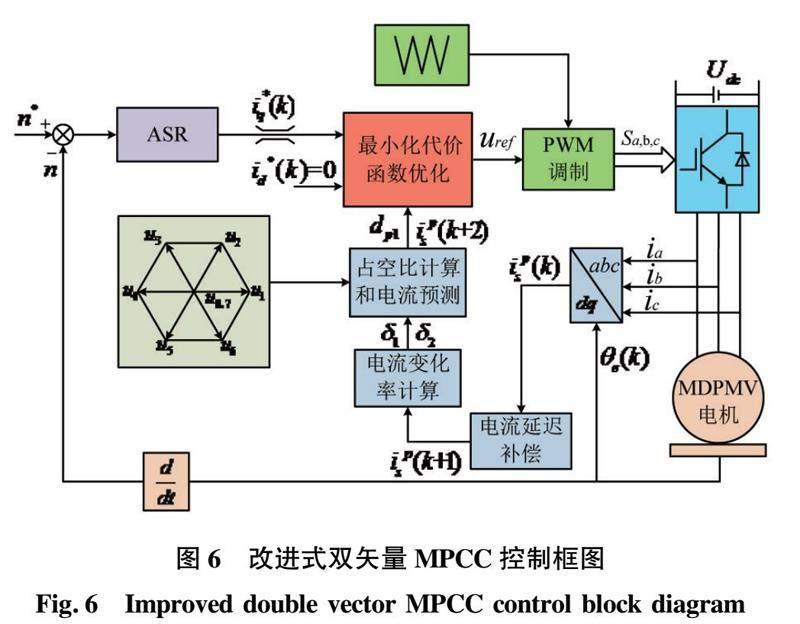
由于DPMV电机的Ld=Lq,故该研究采取id=0控制策略。如图6所示为基于AntiWindup控制器的双矢量MPCC控制框图,其主要实现过程为:首先,给定转速偏差经过AntiWindup PI控制器得到q轴电流给定值iq*(k);然后根据传统MPCC算法遍历寻优出第1个最优电压矢量u1;再利用式(8)和已选出的u1计算出占空比,通过代价函数g对第2个最优电压矢量u2及占空比dp1进行第2次遍历寻优;最后,把选出的2个最优电压矢量及占空比合成參考电压矢量作用于开关器件来控制电机。
3仿真验证
在Matlab/Simulink中建立MDPMV电机控制系统的仿真模型,对所提的改进式双矢量MPCC算法的有效性进行验证。系统仿真所用的MDPMV电机参数:额定电流(In)为5.0 A;额定转矩(Tn)为13.0 Nm;额定转速(n)为600 r/min;相电阻(Rs)为0.46 Ω;d轴电感(Ld)为6.1 mH;q轴电感(Lq)为6.1 mH。仿真中系统的控制周期为50 μs。
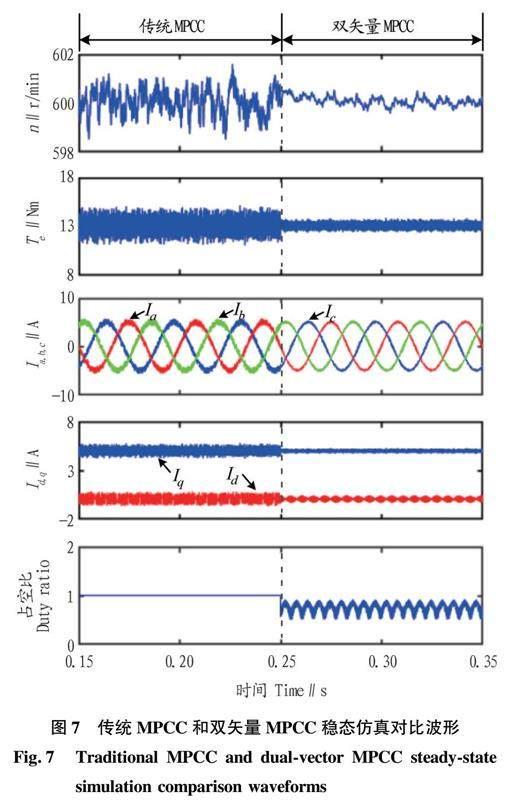
MDPMV电机在额定速度、额定转矩运行下,传统MPCC和双矢量MPCC稳态仿真对比波形如图7所示。由图7可知,在0.25 s时,控制系统由传统单矢量MPCC算法切换至改进式双矢量MPCC算法,0.15~0.25 s传统MPCC算法控制时,三相定子电流波动较大,毛刺较多,谐波含量较多;同时,d、q轴的电流波动分别为1.6和1.7 A,电磁转矩的脉动为4.9 Nm,转速的波动为3.2 r/min。当0.25~0.35 s系统切换至双矢量MPCC算法控制时,三相定子电流波动明显较小,波形更加平滑,谐波含量明显较小;d、q轴的电流波动也减小为0.6和0.5 A,电磁转矩的脉动降低为1.7 Nm,转速的波动减小为0.9 r/min;同时,第1个最优电压矢量作用的占空比由之前的1(100%)调整为根据控制要求进行不同占空比的实时计算。
图8为传统MPCC和改进式双矢量MPCC的a相电流FFT分析对比波形。由图8a可知,传统MPCC电流的总谐波失真THD为8.79%;由图8b可知,改进式双矢量MPCC电流的总谐波失真THD减小为3.25%。显然,该研究提出的双矢量MPCC算法可有效减小转矩脉动、电流波动和转速波动,提升系统的稳态性能。
MDPMV电机额定负载运行时,改进式双矢量MPCC速度动态响应仿真波形如图9所示。由图9可知,在0.20 s时,给定速度由300 r/min突增至600 r/min,电机速度快速响应跟随,在8 ms后达到600 r/min并平稳运行;在0.35 s时,给定速度由300 r/min反向阶跃至300 r/min,在15 ms后达到300 r/min;在0.40 s时,给定速度由300 r/min正向阶跃至300 r/min,在16 ms后达到300 r/min。
图10为MDPMV电机额定转速运行时,改进式双矢量MPCC转矩动态响应仿真波形。从图10可以看出,在0.3 s时,给定负载由15 Nm突增到20 Nm,电磁转矩的响应时间为1.7 ms;在0.5 s时,给定负载由20 Nm突减到15 Nm,电磁转矩的响应时间为1.8 ms。当电机负载突增(减)时,电机转速在受到轻微的扰动后均能快速回到给定转速并平稳运行。仿真结果表明,改进式双矢量MPCC具有较好的速度和转矩动态性能。
传统MPCC和改进式双矢量MPCC仿真性能对比结果如表1所示。由表1可知,基于双矢量的改进式MPCC算法显著改善了系统的控制性能。
4结论
针对MDPMV电机控制系统存在的转矩脉动大、电流波动大和转速波动大等问题,提出一种基于双矢量的改进式模型预测电流控制算法。在分析传统模型预测电流控制不足的基础上,电流内环采用双矢量模型预测电流控制,在一个控制周期内选择2个任意电压矢量以占空比的方式组合作用,进一步扩大了电压矢量的选择和幅值调节范围。同时,考虑系统延迟对控制性能的影响,在预测控制中加入电流延迟环节进行补偿。仿真结果表明,提出的改进式双矢量模型预测电流控制算法可有效减小转矩脉动、电流波动和转速波动,提升MDPMV电机控制系统的稳态性能,同时又具有较好的动态性能,适用于新能源农机等低速大扭矩直驱应用领域。
参考文献
[1] 李志平,郑凯健.中国共产党领导的中国式农业现代化:百年历程·基本经验与未来展望[J].安徽农业科学,2022,50(22):249-254.
[2] 毛小报,毛晓红,王瑾.乡村振兴背景下浙江省农业农村现代化发展水平评价[J].安徽农业科学,2022,50(8):241-245,249.
[3] 刘长铎.乡村振兴战略背景下农村现代化发展对策研究[J].安徽农业科学,2021,49(2):259-262.
[4] 刘学思.数字赋能乡村产业振兴的路径研究[J].安徽农业科学,2023,51(10):251-253.
[5] 田涛.松滋市农业机械化发展助推乡村振兴对策研究[J].安徽农业科学,2022,50(17):253-255,258.
[6] 陈思羽,邱学华,陈晨.智能草莓田间管理机器人的设计[J].安徽农业科学,2019,47(10):179-181.
[7] 王秀平,姜胜龙,曲春雨.新型Halbach阵列永磁游标电机结构优化设计[J].电机与控制学报,2023,27(4):140-147.
[8] LIN Q F,ZHAO X,CAI F B,et al.Design of a dual-permanent-magnet vernier machine to replace conventional surface-mounted permanent magnet motor for direct-drive industrial turbine application[J].IEEE access,2023,11:2291-2302.
[9] YU Y L,CHAI F,PEI Y L,et al.Investigation of PM loss in spoke-type permanent magnet vernier motors with different stator topologies for in-wheel direct drive[J].IEEE transactions on industry applications,2022,58(4):4562-4574.
[10] CHEN Q S,FAN Y,LEI Y T,et al.Multiobjective optimization design of unequal halbach array permanent magnet vernier motor based on optimization algorithm[J].IEEE transactions on industry applications,2022,58(5):6014-6023.
[11] SHI Y J,CHING T W.Power factor analysis of dual-stator permanent magnet vernier motor with consideration on turn-number assignment of inner and outer stator windings[J].IEEE transactions on magnetics,2021,57(2):15.
[12] ZHAO W X,DU K K,XU L,et al.Design considerations of fault-tolerant permanent magnet vernier machine[J].IEEE transactions on industrial electronics,2020,67(9):7290-7300.
[13] 張进,张秋菊.同极内嵌式永磁游标电机电磁性能分析[J].电机与控制学报,2020,24(4):158-164.
[14] 鲍晓华,刘佶炜,孙跃,等.低速大转矩永磁直驱电机研究综述与展望[J].电工技术学报,2019,34(6):1148-1160.
[15] CARLET P G,FAVATO A,BOLOGNANI S,et al.Data-driven continuous-set predictive current control for synchronous motor drives[J].IEEE transactions on power electronics,2022,37(6):6637-6646.
[16] LIM C S,LEE S S,LEVI E.Continuous-control-set model predictive current control of asymmetrical six-phase drives considering system nonidealities[J].IEEE transactions on industrial electronics,2023,70(8):7615-7626.
[17] GAO J Q,GONG C,LI W Z,et al.Novel compensation strategy for calculation delay of finite control set model predictive current control in PMSM[J].IEEE transactions on industrial electronics,2020,67(7):5816-5819.
[18] 王亮,耿强,周湛清.五桥臂双永磁同步电机系统双矢量模型预测电流控制[J].电机与控制应用,2020,47(2):27-33,41.
[19] XU Y P,ZHANG B C,ZHOU Q.A Model predictive current control method of PMSM based on the simultaneous optimization of voltage vector and duty cycle[C]//2016 IEEE 8th international power electronics and motion control conference.Hefei,China:IEEE,2016:881-884.
[20] 嵇越,薛雅丽,万勇.基于占空比优化的永磁同步电机双矢量FCSMPC[J].机械制造与自动化,2017,46(6):177179,184.
作者简介黄志凡(1992—),女,浙江嘉兴人,工程师,硕士,从事农业装备自动化与数字化研究。
