
无刷直流电机PWM调速技术的建模与仿真
2012-08-21 10:15荣军,杨航,曾宇,王伟,徐致,韩良
湖南理工学院学报(自然科学版) 2012年3期
荣 军,杨 航,曾 宇,王 伟,徐 致,韩 良
(湖南理工学院 信息与通信工程学院,湖南 岳阳 414006)
引言
无刷直流电机主要有如下优点:(1)噪音小:与传统的直流电机相比,因为没有电刷的原因,所以不会产生由机械换相引起的噪音;(2)效率高:无刷直流电机的转子是永磁体,所以其可提供恒定的磁场不要再外加能源;(3)控制简单:在一个电磁周期内只需知道转子的六个关键位置信号.如果电机定子绕组的电阻不计,则电机的电压与转速成正比,电流与转矩成正比,所以控制系统较容易实现[1].综上所述,永磁无刷直流电动机具有一系列优点,已在诸多领域如交通、工业、家电、航空航天、军工、伺服控制等领域都被广泛地使用,因此对其控制方式的研究可以更广泛的挖掘其应用潜力,为工农业生产提供方便.
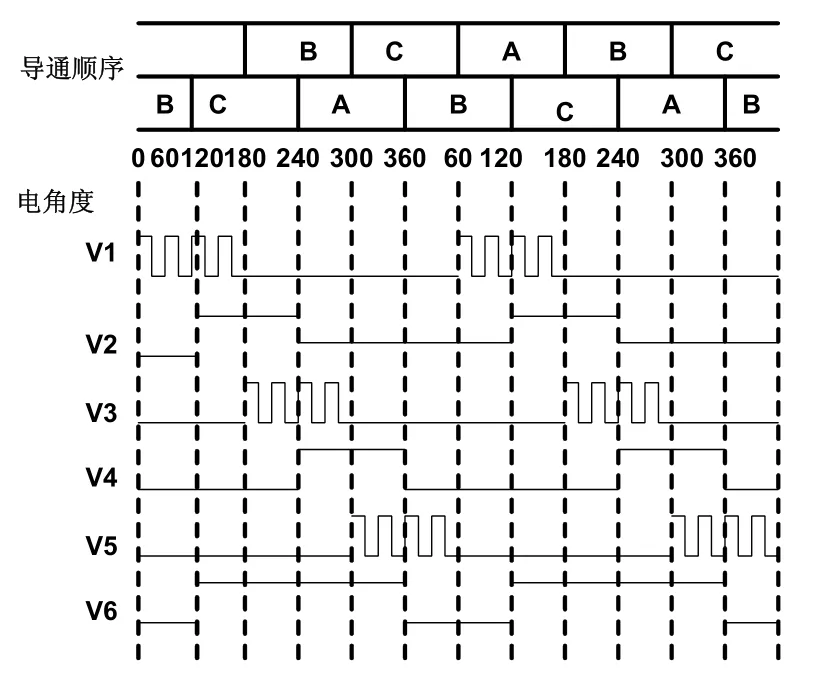
图1 采用PWM方式调速时功率开关管调制方式
1 无刷直流电机PWM调速原理
无刷直流电机 PWM(脉宽调制)调速是通过 PWM 斩波器将直流电源斩成PWM波,从而改变加在电枢两端的电压平均值,以调节电动机的转速.采用PWM方式调速时功率开关管调制方式如图1所示.图1中采用的是HPWM-LON调制模式,即两相导通星型三相六状态工作方式下对应导通的上桥臂功率开关管V1、V3、V5受PWM信号调制,下桥臂功率开关管V4、V6、V2恒通. 如果 BLDCM 系统采用两相导通星形三相六状态导通方式时,也就是在任一时刻,只有两相绕组导通,那么采用PWM调制时电枢两端的电压波形如图2所示[2].
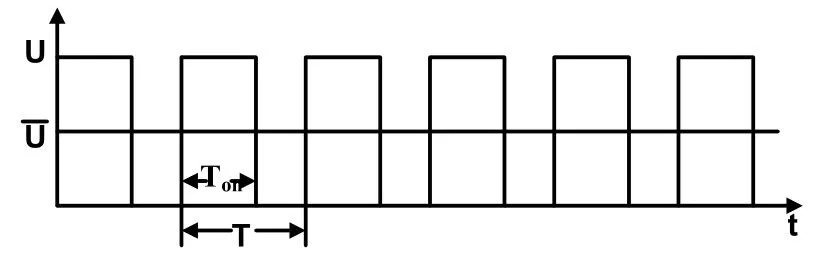
图2 PWM调制时电枢两端的电压波形
电枢电压平均值:

其中U为直流电源电压;为电枢电压平均值;Ton为功率开关管在一个 PWM 周期的开通时间;T为PWM波的周期;为PWM波的占空比.
这时无刷直流电机的转速公式变为:

由(1)和(2)式联立可得:

可见,在恒转矩特性下,无刷直流电机的转速与 PWM 波的占空比成正比,这也就是无刷直流电机PWM调速的原理.
2 无刷直流电机的PWM调速四种模式
在无刷直流电机的控制系统中,当采用两相导通星形三相六状态工作模式时,每个周期中每个功率开关管导通 120°电角度,导通相位分别滞后 60°电角度.六个功率开关管导通方式受 PWM 信号调制.PWM信号调制有四种模式[3],如图3所示.
ON-PWM:各管前60°电角度恒通,后60°电角度受PWM信号调制,如图3(a)所示.PWM-ON:各管前 60°电角度受 PWM信号调制,后 60°电角度恒通,如图 3(b)所示.HPWM-LON:上桥臂受 PWM信号调制,下桥臂恒通,如图3(c)所示.HON-LPWM:上桥臂恒通,下桥臂受PWM信号调制,如图3(d)所示.其中,ON-PWM、PWM-ON为双单边双管调制模式,HPWM-LON、HON-LPWM为单边单管调制模式.

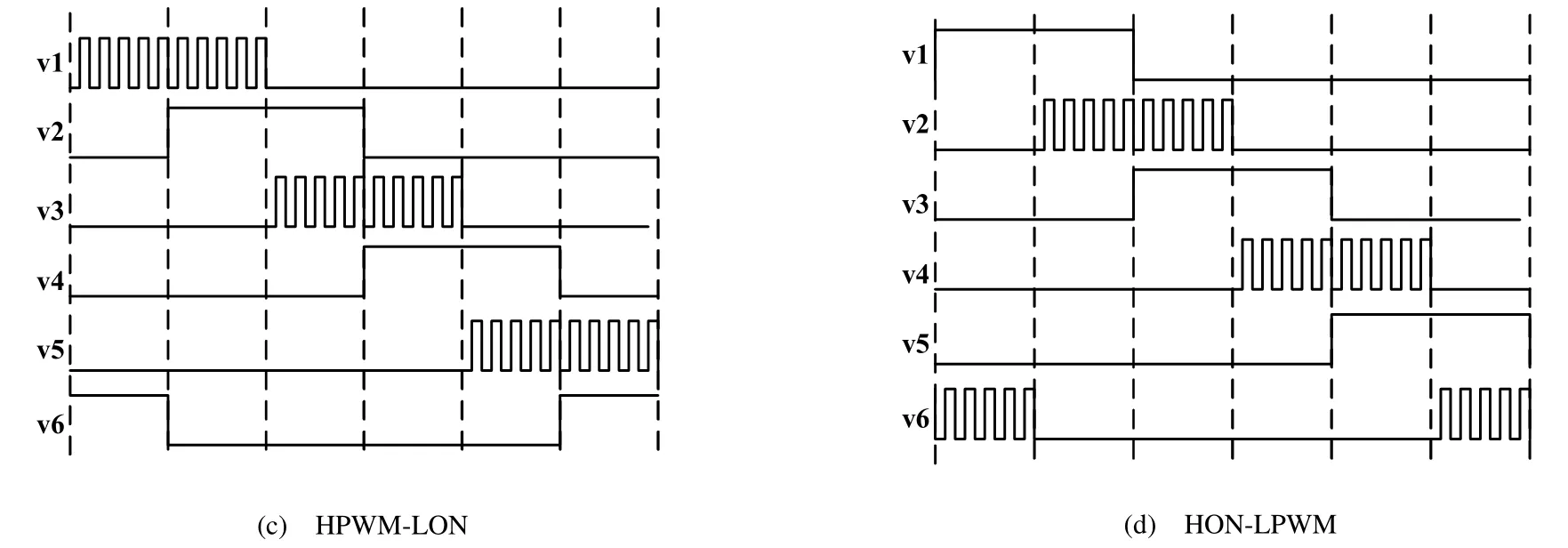
图3 四种模式调制波形图
3 基于Matlab的四种PWM模式的BLDCM系统的建模仿真以及分析
3.1 无刷直流电机PWM 调速的Matlab仿真模型
无刷直流电机的数学模型在许多文献中都详细描述[4],本文不作讨论.参照文献[4]建立无刷直流电机在 Matlab/Simulink中的仿真模型如图 4所示.其中无刷直流电机仿真参数设置如下:电机转速为2000(转/分),极对数p= 2,定子相绕组电阻R= 4.765欧姆,定子相绕组自感L为8.5mH,互感M为0.1mH,输入电压US为300V.控制器Controller的仿真模型如图5所示,控制器作用是根据转子磁极位置分配电动机三相绕组的通电,即控制逆变器模块6个开关器件的开关次序.Controller模块由电动机观测得到的转子位置角(theta),通过Rounding Function、Relational Operator等模块运算得到以2π为周期、每隔π/3产生一个脉冲宽度为2π/3的方波脉冲,该方波脉冲与脉宽调制器产生的脉宽信号(pulse)经过与门(AND)运算总共产生6路驱动信号,由gate端输出.转速调节器输出脉宽控制信号,并通过脉宽调制器调节脉冲宽度,用于根据转速调节无换向器电动机的三相电压.
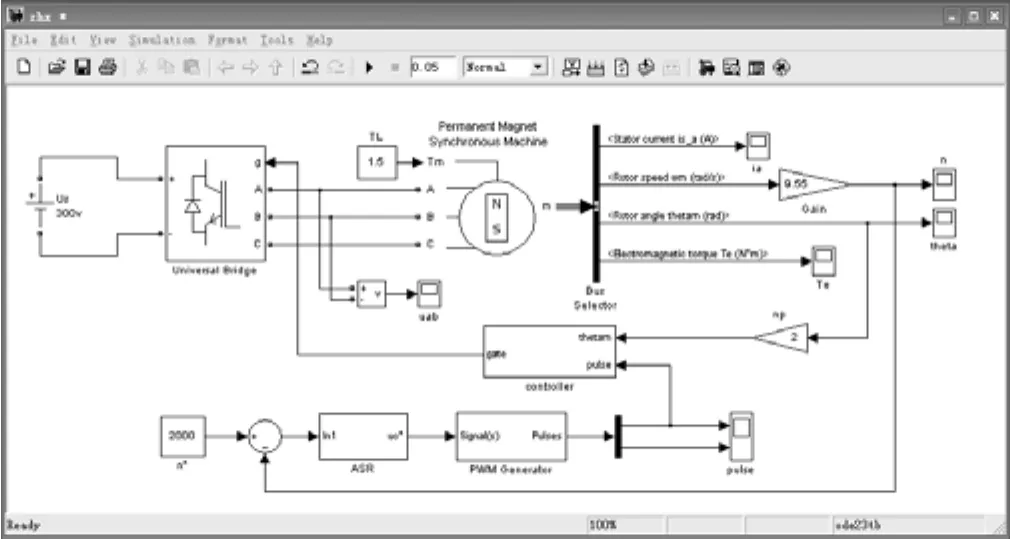
图4 无刷直流电机的仿真模型
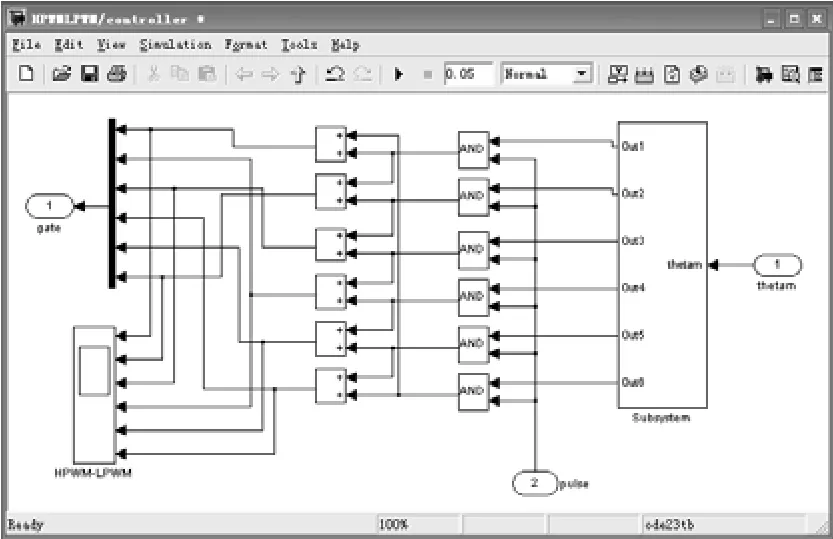
图5 无刷直流电机控制器的仿真模型
3.2 仿真结果及分析
图6、图7和图8分别是四种不同PWM调制模式下的转矩仿真波形、A相电流仿真波形和转速仿真波形[5].从四种不同的 PWM 调制仿真波形来看,不同的模式对无刷直流电机的影响也不尽不同,这个可以从电流、转速和转矩三个方面得出.从转速方面看,在给定的转速为2000r/min时,HON-LPWM调制模式下峰值约为 2550r/min,且超调量最小、谐波量很少,稳定性也较好;其他的调制模式下峰值均约为 2700r/min,其中 PWM-ON谐波量较少,其他两种谐波丰富.从转矩方面看,在给定负载转矩为1.5N·m时,HON-LPWM调制模式下的转矩脉动最小,PWM-ON和HPWM-LON次之,ON-PWM转矩脉动最大.从电流方面看,在换相期间,HON-LPWM波动最小,ON–PWM次之,PWM-ON和HPWM-LON最大.综合来说,除去最为理想的HPWM-LPWM调制模式,因此在上面四种PWM调制模式中,HON-LPWM调制模式在无刷直流电机的应用中相对来说具有更好的效果.
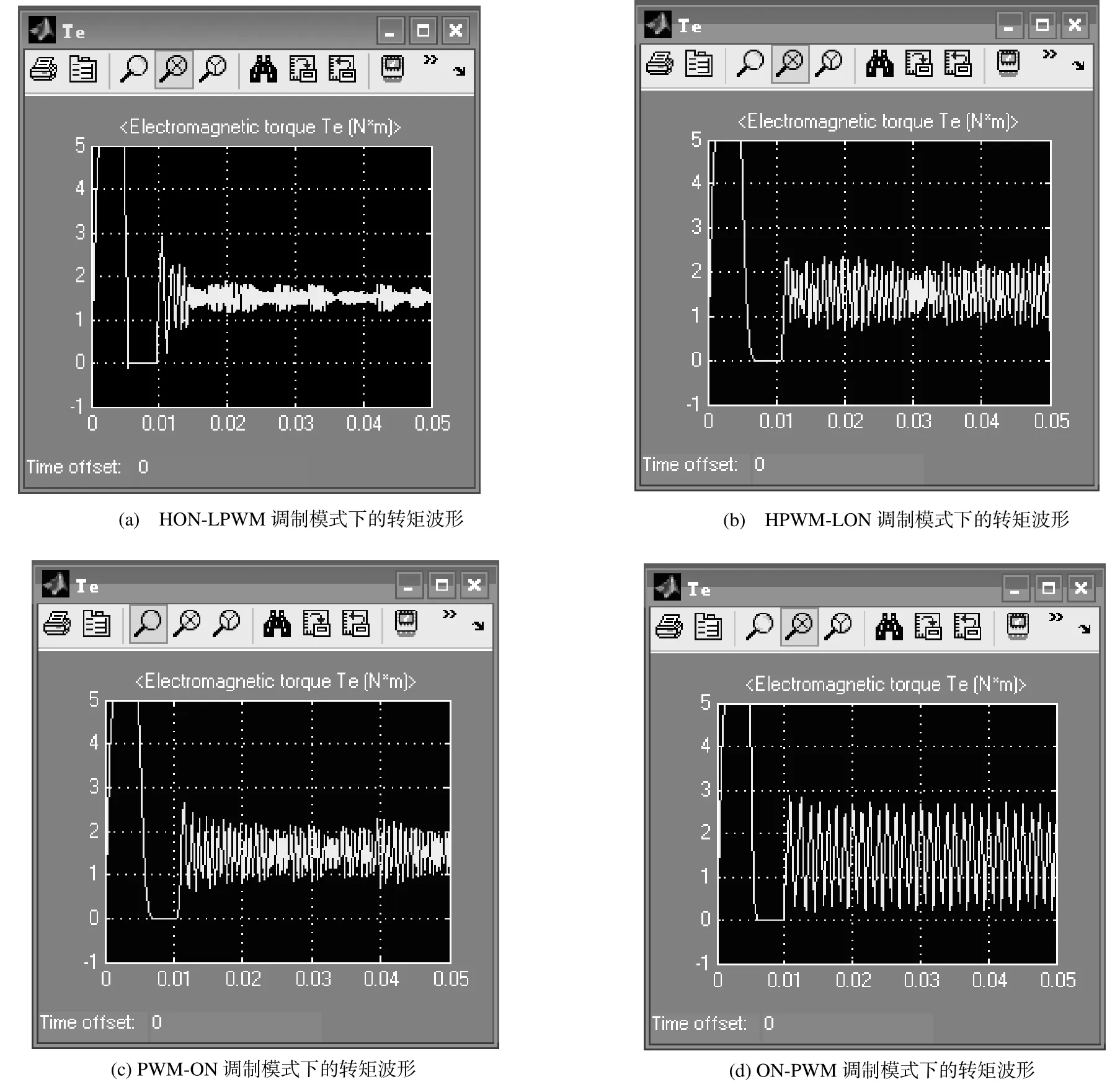
图6 不同PWM模式下的转矩仿真波形
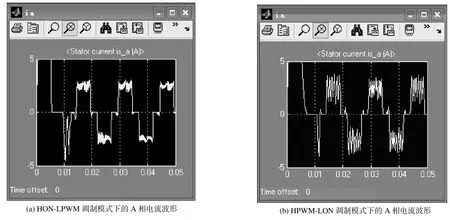
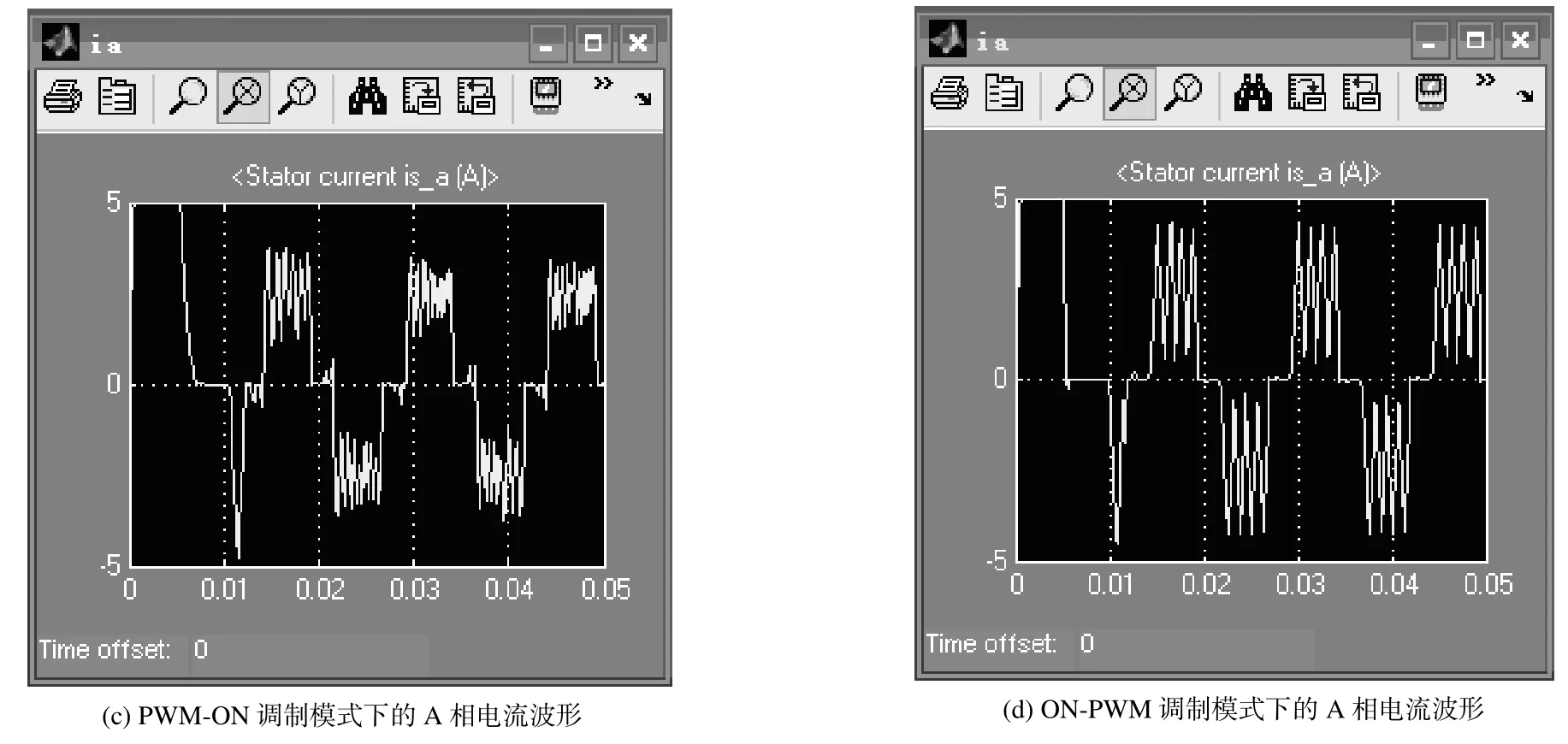
图7 不同PWM模式下的A相电流仿真波形
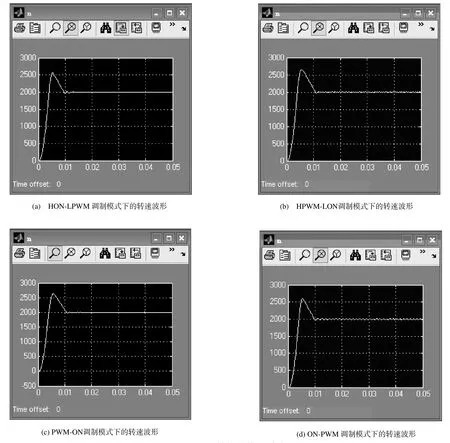
图8 不同PWM模式下的转速仿真波形
4 结论
介绍了无刷直流电机四种不同PWM调速的方法,并详细分析了其调速的原理,并在Matlab/Simulink中进行了建模和仿真.仿真结果表明,选择合适调速方法,能显著的减小电机运行时电枢电压谐波含量和转矩脉动.因此无刷直流电机选择合适的调速方法能在工农业生产指导方面能提供很大的方便.
[1] 郭庆鼎,赵希梅.直流无刷电动机原理与技术应用[M].北京:中国电力出版社,2008
[2] 张 深.直流无刷电动机原理及应用[M].北京:机械工业出版社,1996:22~47
[3] Rong Jun,Li Yiming,Ding Yuejiao,etc.The Simulation Study of BLDCM Speeding on Different PWM Mode[C].中国能源学会会议论文,2012,3:1370~1374
[4] 荣 军,丁跃浇,张 敏,等.对转永磁无刷直流电机建模与仿真[J].湖南工业大学学报(自然科学版),2010,24 (5):33~36
[5] 洪乃刚.电力电子和电力拖动控制系统的MATLAB仿真[M].北京:机械工业出版社,2006
猜你喜欢
大电机技术(2022年5期)2022-11-17
火力与指挥控制(2022年5期)2022-07-25
弹箭与制导学报(2020年1期)2020-07-09
家庭影院技术(2019年7期)2019-08-27
弹箭与制导学报(2019年6期)2019-06-24
猪业科学(2018年5期)2018-07-17
电子制作(2017年1期)2017-05-17
数字通信世界(2017年2期)2017-02-25
中国工程咨询(2016年2期)2016-02-12
淮南师范学院学报(2015年3期)2015-03-22
