3D打印导航模板与计算机导航系统在辅助椎弓根螺钉置入准确性与安全性的Meta分析
2024-03-15 05:46王一迪范利娟刘永辉王向阳崔宏勋
中国实用神经疾病杂志 2024年3期
王一迪 范利娟 刘永辉 王向阳 崔宏勋
1)河南中医药大学,河南 郑州 450000 2)河南省洛阳正骨医院(河南省骨科医院),河南郑州 450000
近些年,脊柱退行性病变及骨质疏松症的患者比例逐年增长,脊柱退行性病变常见于中老年人,临床常见的有腰椎间盘突出症、腰椎管狭窄症、腰椎滑脱等,其手术治疗的目的是实现坚固的脊柱稳定性及良好的骨性融合功能[1]。自20 世纪90 年代椎弓根螺钉固定术被成功应用于脊柱侧凸的治疗后[2],这种术式就开始逐渐被应用于各种脊柱病变的治疗过程中,提供了良好的早期稳定性和脊柱融合率[3],显示出良好的放射学和临床效果[4]。但由于椎弓根所处的解剖位置结构及神经血管分布都较为复杂,使得这种术式对内固定螺钉置入方向及长度的要求极高,椎弓根螺钉置钉位置不佳会导致并发症发生率较高[5-6],主要表现为损伤脊髓、神经根及血管及腹腔脏器等,严重者会出现偏瘫、大小便失禁等并发症[7]。
为提高椎弓根螺钉置钉的安全性和准确率,降低术后因螺钉置入椎弓根位置不佳而引起的血管、神经损伤,国内外学者均行进一步的研究,并设计了多种辅助置钉技术,如C型臂X射线透视辅助置钉、便携式电子导航开路器置钉、3D 打印导航模板辅助置钉、计算机导航系统技术等。但这些方法存在许多不足之处,如C 型臂X 线透视会增加患者及医生辐射量,延长手术时间。目前较常用的辅助置钉技术是3D 打印导航模板和计算机导航系统辅助置钉技术。计算机导航系统将计算机及影像技术结合起来,使医生可以在可视化三维解剖信息引导下实施手术[8],相较于传统椎弓根螺钉置入术来说简化了椎弓根螺钉入口点和轨迹的选择,提高了置钉安全性和准确性[9],但这种术式在术中需要固定参考架,可能导致手术时间的延长[10-11]。近些年,3D 打印导板辅助置钉技术操作简单、无需特殊设备[12],在脊柱病变中得到广泛使用[13]。3D 打印技术可以在术前打印出立体实物,有利于医生更好地了解病变部位、性质,对病人的病情做出较为准确的判断,制定术前规划[14];术中基于3D打印的导航模板可以按术前计划钉道实现个性化椎弓根置钉,减少了术中透视次数,缩短了手术时间[15],但3D打印材料昂贵、对术者计算机操作及技术要求高,使其在临床的推广应用有一定难度。本文通过对国内外采用3D 打印导航模板与计算机导航系统在辅助椎弓根螺钉置入准确性与安全性的对比研究进行Meta 分析,以评价两种术式的优缺点。
1 资料与方法
1.1 文献检索策略
1.1.1 检索者和检索资料库:由第一,第二作者检索中国知网、万方数据库及维普网、PubMed、Web of Science、The Cochrane Library 数 据 库 自 建 库 至2022-11的文献。
1.1.2 检索词:中文检索词:“3D打印导航模板、计算机导航系统、椎弓根螺钉内固定、脊柱退行性变、脊柱相关疾病、腰椎间盘突出症、椎管狭窄症、腰椎滑脱、胸腰椎骨折、脊柱侧凸、辅助技术、辅助手术”。英 文 检 索 词:“3D pringting;computer-assisted navigation;pedicle screw fixation;spinal degeneration;spinal related diseases;lumbar disc herniation;lumbar spinal stenosis;lumbar spondylolisthesis;thoracolumbar fracture; scoliosis; assisted surgery; assisted technology”。
1.1.3 数据库检索策略:中文文献检索策略以中国知网为例,英文文献检索策略以PubMed为例。
1.2 文献纳入与排除标准纳入标准:(1)研究类型:文献检索使用上述公开数据库中关于3D 打印导航模板与计算机导航系统在辅助椎弓根螺钉置入准确性与安全性效果对比的随机对照试验、前瞻性或回顾性临床对照试验;(2)研究对象:包括脊柱侧凸、椎间盘突出、椎管狭窄、椎体滑脱及胸腰椎骨折等脊柱疾病在内的临床体内研究;(3)干预措施:试验组采用3D 打印导航模板置钉,对照组使用计算机导航系统置钉;(4)结局指标:包括平均置钉时间、手术时间、术后6 个月JOA 评分和VAS 评分、术后并发症发生率、术中出血量、术中透视次数及置钉准确率等指标中的任何一项或几项;(5)文献语言:中文或英文。
排除标准:(1)非研究类文献,如综述、个案报道;(2)非人体研究,如动物、模型等;(3)无法获取全文的文献;(4)数据不完整;(5)分组不清晰;(6)研究措施不符合本研究;(7)中、英文以外的其他语言研究。
1.3 文献筛选及资料提取进行文献检索后,根据纳入和排除标准对检索到的文献进行筛选,以达到冗余和初选的目的,然后对文献的标题和摘要进行审查,初步确定是否应纳入研究,阅读选定文献全文,以确认其是否纳入。最终,由2 名研究者将筛选出的文献进行交叉核对,若持不同意见,则与第3 位研究者协商决定文献是否应该被纳入。最后对本研究所纳入的研究进行资料提取,具体内容包括第一作者、发表年份、病例数量、平均年龄、干预措施、研究类型、随访时间、手术时间及术后并发症等情况。
1.4 文献质量评价随机对照类文献依据Cochrane手册对其进行质量评价,包括7 个方面,每个方面又包括3 个等级,如随机分配方法、盲法的实施等几个方面;回顾性研究的质量评价根据NOS 质量评价量表进行,文献总分为9 分,得分少于5 分视为低质量文献。
1.5 结局指标手术时间、平均置钉时间、术中透视次数、术中出血量、术中透视次数、术后6个月时JOA和VAS评分、置钉准确度、术后并发症发生率。
1.6 统计学分析研究采用RevMan 5.3 软件进行Meta 分析,计数资料用相对危险度(relative risk,RR)表示,计量资料用均数差(mean difference,MD)表示,计算其95%的可信区间(95% confidence interval,95%CI)。根据Q 检验和I2值判断各研究间的异质性,若P>0.05,I2<50%说明各研究间异质性较小,存在统计学同质性,采用固定效应模型分析。P<0.05,I2>50%时说明各研究间异质性较大,存在统计学异质性,需进一步进行亚组分析和敏感性分析异质性的来源。若通过各种方式均无法找到异质性来源,则采用随机效应模型分析。检验水准α=0.05。
2 结果
2.1 文献检索结果本次Meta 分析共检索到文献174 篇,通过文献管理软件剔除重复文献后剩余106篇,阅读题目及摘要对剩余文献进行初步筛选,得到文献74篇,阅读全文后排除质量较低的文献,最终共纳入7篇文献。
2.2 文献基本情况最终共纳入研究文献7 篇,包含随机对照试验3篇,回顾性文献4篇,共计346例患者。其中,3D打印导航模板组178例,计算机导航系统组168例。11篇文献详情见表1。
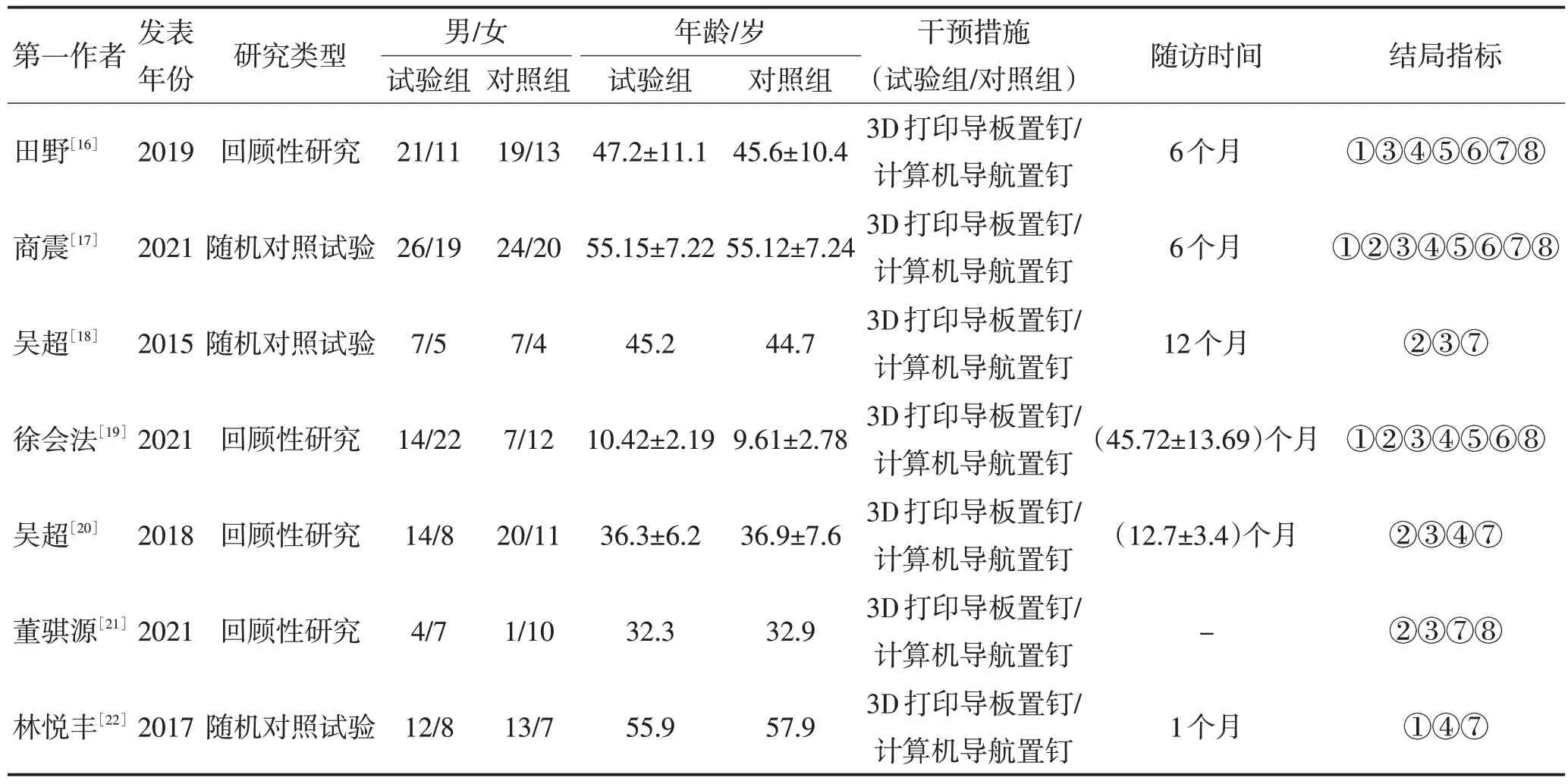
表1 纳入研究的基本信息Table 1 Basic information of the included literature
2.3 文献质量评价纳入的7篇文献的质量评价按Cochrane 手册进行,结果见图1、2;回顾性研究按文献质量评价量表(NOS量表)进行,结果见表2。

图1 随机对照试验偏倚风险评价比例Figure 1 Risk of bias assessment diagram
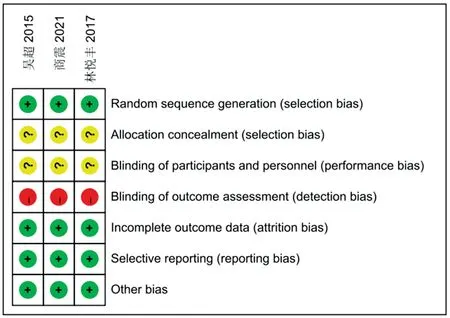
图2 随机对照试验偏倚风险评价Figure 2 Risk of bias summary
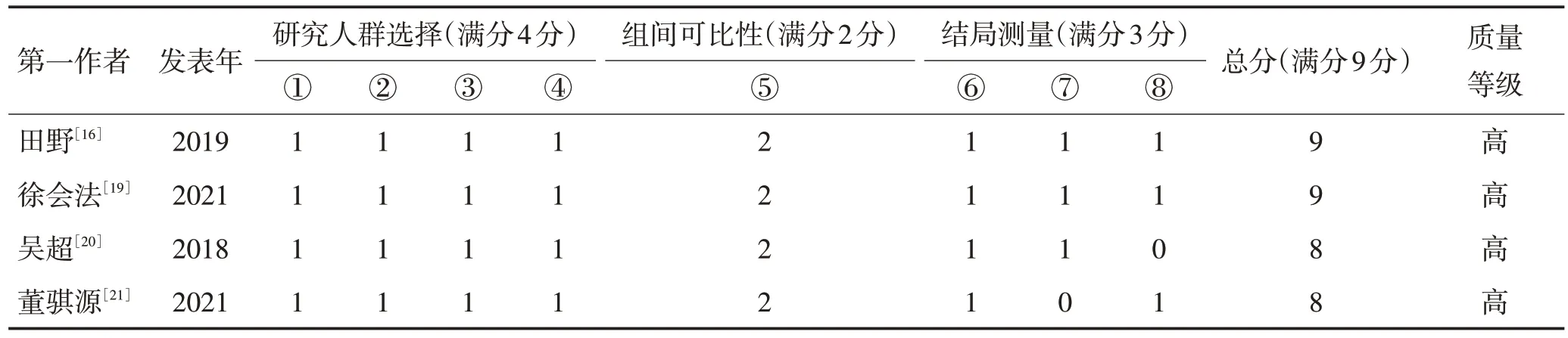
表2 纳入研究的回顾性研究偏倚风险评价结果Table 2 Risk of bias assessment results of retrospective cohort studies
2.4 Meta分析结果
2.4.1 平均置钉时间比较:4个研究比较了2组的平均置钉时间(试验组133 例,对照组115 例)[16-17,19,22]。各研究间异质性较高(I2=100%,P<0.000 1),通过对纳入文献进行逐一剔除及亚组分析均无法消除异质性,故采用随机效应模型分析。Meta 分析结果显示,3D 打印组的平均置钉时间与计算机导航组相比差异有统计学意义(MD=-4.92,95%CI:-8.50~-1.35,P<0.05),见图3。
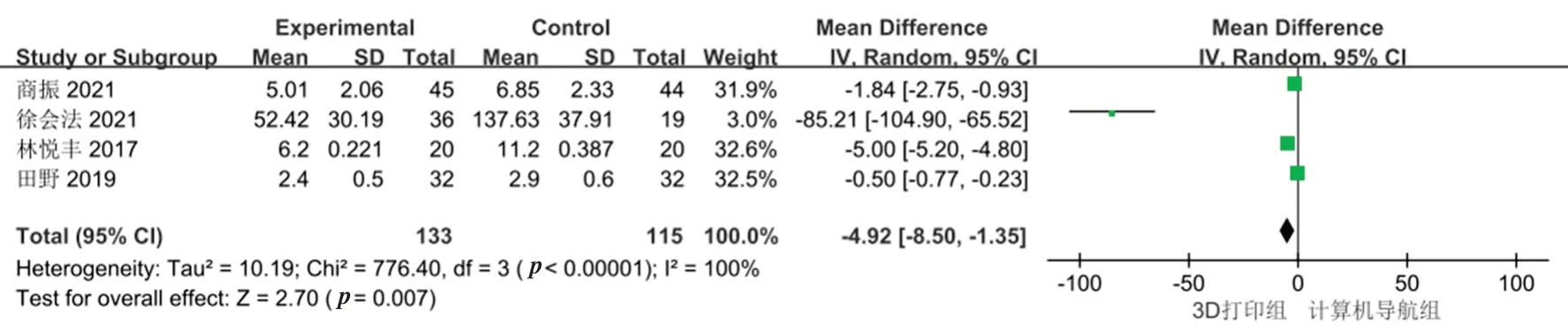
图3 3D打印组与计算机导航组平均置钉时间比较的Meta分析森林图Figure 3 Forest plot of average screw placement time of 3D printing group vs computer navigation group
2.4.2 手术时间比较:5个研究比较了2组间手术时间(试验组126例,对照组116例)[17-21],异质性检验显示各研究间异质性较大(I2=95%,P<0.000 1),对纳入文献进行逐一剔除,无法消除其异质性,故采用随机效应模型进行分析,Meta分析显示,3D打印组的手术时间与计算机导航组相比差异有统计学意义(MD=-41.10,95% CI:-74.54~-7.67,P<0.05),见图4。

图4 3D打印组与计算机导航组手术时间比较的Meta分析森林图Figure 4 Meta-analysis forest plot comparing operation time between the 3D printing group and the computer-navigated group
2.4.3 术中出血量的差异:6个研究比较了2组患者术中出血量(试验组158例,对照组148例)[16-21],各研究间异质性较高(I2=85%,P<0.000 1),通过各种方法均无法消除其异质性,故采用随机效应模型进行分析,结果显示3D打印组与计算机导航组的术中出血量差异无统计学意义(MD=-10.97,95% CI:-29.38~7.44,P=0.24),见图5。
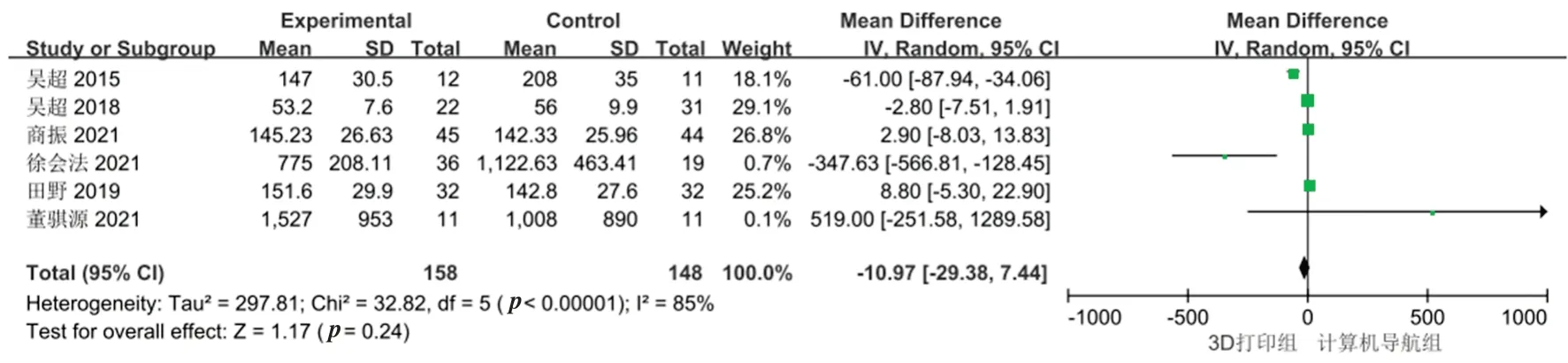
图5 3D打印组与计算机导航组术中出血量比较的Meta分析森林图Figure 5 Forest plot of intraoperative bleeding volume of 3D printing group vs computer navigation group
2.4.4 术中透视次数的差异:4 篇文献报道了2 组间术中透视次数的差异(试验组135 例,对照组126例)[16-17,19-20],2 组间存在较大异质性(I2=97%,P<0.000 1),对纳入研究进行敏感性分析,将每个纳入文献进行逐一剔除再进行效应量合并,结果并未发生改变,故采用随机效应模型进行分析,结果显示,3D打印组与计算机导航组的术中透视次数差异无统计学意义(MD=0.81,95% CI:-0.85~2.46,P=0.34),见图6。

图6 3D打印组与计算机导航组术中透视次数比较的Meta分析森林图Figure 6 Forest plot of times of intraoperative fluoroscopy of 3D printing group vs computer navigation group
2.4.5 术后6个月JOA的差异:纳入的3个研究比较了2组患者术后6个月JOA(试验组113例,对照组95例)[16-17,19],异质性检验显示2组间不存在异质性(I2=0,P=0.70),故采用固定效应模型进行分析。结果显示,3D打印组的术后6个月JOA评分与计算机导航组相比差异无统计学意义(MD=0.10,95% CI:-0.50~0.70,P=0.73),见图7。

图7 3D打印组与计算机导航组术后6个月JOA评分比较的Meta分析森林图Figure 7 Forest plot of JOA score 6 months after surgery of 3D printing group vs computer navigation group
2.4.6 术后6 个月VAS 的差异:3 篇文献比较了2组患者术后6 个月VAS(试验组113 例,对照组95例)[16-17,19],异质性检验显示2组间不存在异质性(I2=0,P=0.53),故采用固定效应模型进行分析。结果显示,3D打印组的术后6个月VAS评分与计算机导航组相比,差异无统计学意义(MD=-0.01,95% CI:-0.16~0.13,P=0.84),见图8。

图8 3D打印组与计算机导航组术后6个月VAS评分比较的Meta分析森林图Figure 8 Forest plot of VAS score 6 months after surgery of 3D printing group vs computer navigation group
2.4.7 置钉准确率的差异:6个研究报道了2组间术后置钉准确率(试验组495例,对照组569例)[16-18,20-22],其中3D 打印导航模板辅助下准确置钉454 例,准确率为91.7%;计算机导航辅助下准确置钉500 例,准确率为87.9%。异质性检验显示各研究间异质性较高(I2=62%,P=0.02),通过逐一排除每个纳入的研究进行敏感性分析,董骐源[21]的研究剔除后,异质性明显降低(I2=0,P=0.53),采用固定效应模型进行分析,结果显示3D 打印组的置钉准确率与计算机导航组相比差异有统计学意义,3D 打印组置钉准确率明显高于计算机导航组(RR=1.09,95% CI:1.04~1.15,P=0.001),见图9。
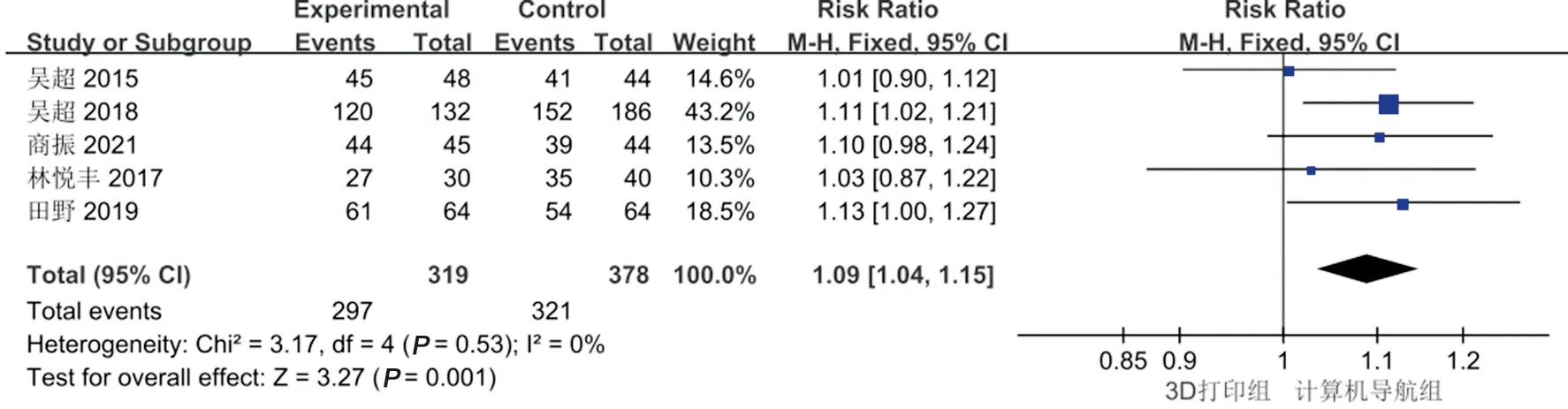
图9 3D打印组与计算机导航组置钉准确率比较的Meta分析森林图Figure 9 Forest plot of the accuracy of pedicle screw placement of 3D printing group vs computer navigation group
2.4.8 术后并发症发生率:4 篇文献报道了2 组术后并发症发生率(试验组156 例,对照组138例)[16-17,19,21],异质 性检验发现2 组间存在异质性(I2=62%,P=0.11),敏感性分析及亚组分析均无法确定其异质性来源,因此采用随机效应模型进行数据分析,结果显示3D 打印组与计算机导航组术后并发症发生率无统计学差异(RR=0.81,95% CI:0.10~6.52,P=0.84),见图10。
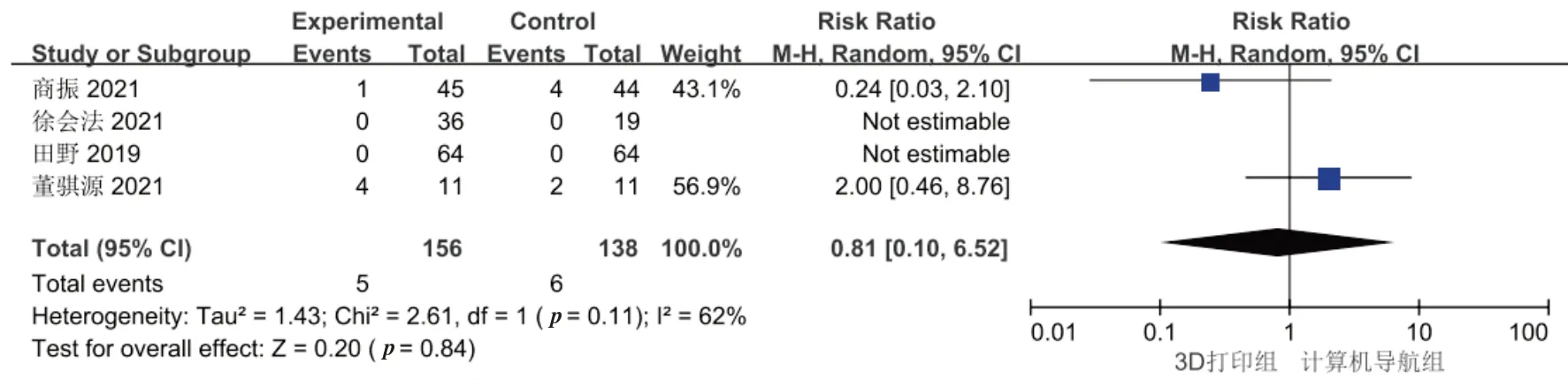
图10 3D打印组与计算机导航组术后并发症发生率比较的Meta分析森林图Figure 10 Forest plot of the rate of complication of 3D printing group vs computer navigation group
2.5 发表偏倚分析使用RevMan 软件制作漏斗图进行发表偏倚分析时,原则上结局指标纳入文献数量应≥10 篇,才能保证得出的结果稳定、可靠,而本次研究所有结局指标的纳入文献数均不满10 篇,故未进行发表偏倚分析。
3 讨论
1959 年Boucher 利用椎弓根结构首次成功置入椎弓根螺钉[23],随后椎弓根螺钉固定系统在脊柱创伤、脊柱畸形及脊柱退行性疾病的后路手术治疗中发挥了越来越重要的作用。传统的徒手椎弓根置钉技术能否成功置钉在很大程度上是由临床医师的经验决定的,在临床置钉过程中常因位置不佳而导致脑脊液漏、内固定失败、神经血管损伤,尤其对于先天性脊柱畸形等复杂脊柱疾病患者来说,增加了致残率和病死率,故椎弓根螺钉置入准确性对手术效果十分重要。因此,临床出现了多种辅助置钉技术以提高椎弓根螺钉置入准确性,降低损伤患者神经、血管的概率。其中,计算机导航系统辅助置钉技术和3D 打印导航模板辅助置钉技术凭借较高的置钉准确率及安全性在临床得到广泛使用。
3.1 文章结果分析本文系统评价了3D 打印导板和计算机导航系统在椎弓根螺钉置入术中的辅助置钉效果,探讨了两者之间的安全性和应用价值,从有效性上看,3D 打印组的置钉准确率明显高于计算机导航组,说明3D 打印导航模板的置钉效果优于计算机导航系统;从安全性上看,3D 打印组的平均置钉时间、手术时间均少于计算机导航置钉组,且两者的术中出血量、术中透视次数、并发症发生率及术后6 个月时的JOA 及VAS 评分无统计学差异,说明相较于计算机导航置钉技术,3D 打印导板置钉技术在置钉有效性和安全性方面更具有优势;术后6 个月,2 组之间的VAS、JOA 评分无统计学差异,说明椎弓根内固定术能较好地缓解疼痛、恢复脊柱功能,与两种椎弓根螺钉辅助置入方法无明显关联。2 组术中出血量及术后并发症发生率比较无统计学差异,说明两种椎弓根螺钉辅助置入手段对手术安全性指标的影响不大,都是安全性较高的手术方式,不仅疗效确切,且安全性高。
计算机导航辅助置钉技术可通过术中三维CT提供的准确指引和导航,从而选取最佳置钉位置,完成置钉,为特殊、疑难病例提供了更好的手术规划,保障了手术安全[24]。计算机导航辅助置钉技术也存在不足之处:(1)计算机导航系统操作复杂,存在一定的学习曲线,对于初学者可能会导致手术时间的延长,术中出血量及术后感染风险增加;(2)对于长阶段的患者需要2 次或多次扫描,增加了医患双方的放射损伤;(3)需要配套的导航设备及其专用手术配套设施,在基层医院较难推广;(4)术中为了加快配准速度、提高导航精度,需要对手术部位周围软组织进行广泛剥离,以显露骨性结构,会对患者造成较大的创伤,增加术中出血量及术后感染的风险。与计算机导航辅助置钉相比,3D 打印导板辅助置钉技术具有以下优势:(1)3D 打印技术的手术操作较为简单,学习成本较低,术中也无需注册和多次透视,降低了手术难度;(2)3D 打印导板辅助置钉技术简化了置钉程序,置钉不会受手术节段相邻椎体、呼吸运动等的影响,避免了术中出现的置钉偏差,减少手术时间[25];(3)3D 打印导板技术针对患者个人使用不同的个性化导板,为手术医师提供更全面、详细的病变信息,增加了置钉准确性;(4)3D 打印导板辅助置钉技术不需要其他专门的辅助设备,降低了成本;(5)术前术者可根据3D打印模板设计好进钉点、进钉方向和角度、截骨位置、截骨方式,制定最佳手术方案、预判术后截骨后的脊柱形态等,安全性更高。
本文显示,3D 打印导板辅助置钉技术在手术时间、平均置钉时间及置钉准确率等方面均优于计算机导航辅助置钉技术,说明其具有更高的安全性及置钉准确性。以往也有研究表明3D 打印导航模板辅助置钉技术相较于计算机导航系统具有更显著的优势,Lu 等[26]的研究证明3D 打印导航模板置钉技术的导板与相应椎体有固定的位置关系,可以为医生提供实时导航及最佳进钉点和进钉角度,是一种更加安全、简单的术式。相关文献报道,即使对于熟练的外科医生来说,螺钉置入后不良反应的发生率仍>10%[27],尤其对于如胸腰椎结核等解剖复杂、累及椎体较多的脊柱疾病来说,不良反应的发生率更高,但相关研究表明3D 打印技术可显著降低不良反应的发生率。杨义等[28]通过前瞻性随机对照试验研究了3D 打印胸腰椎结核模型及导板在指导腰椎结核手术上的准确性与安全性,结果证明相较于传统徒手置钉,3D 打印导板辅助置钉技术的手术时间较短、术中出血量少、透视次数少、平均置钉时间短、并发症发生率低,是一种效率、精度和安全性均较高的手术方式,可应用于复杂的胸腰椎结核的手术。Garg 等[29]将3D 打印导航模板辅助置钉技术应用于脊柱畸形矫形术及翻修手术,发现这种术式可有效缩短手术时间、减少出血、降低放射线对医患双方的伤害;钟远鸣等[30]系统评价了3D 打印导板辅助置钉技术和传统置钉技术在治疗寰枢椎不稳上的安全性与稳定性,发现3D 打印导航模板技术有利于术者更好地了解患者寰枢椎病理状态,术前可通过3D 打印导板选择寰枢椎最合适的进钉点和钉道方向,术中不会因患者体位变化而出现错位失效现象;肖强等[31]设计出一种用于下颈椎双侧前路椎弓根螺钉置钉的3D 打印导航模板,并将其应用于辅助颈前路椎弓根螺钉的置入,结果显示60 枚颈前路椎弓根螺钉均顺利置入,具有良好的安全性。由此可见,3D 打印导航模板加深了临床医师对复杂脊柱手术的认识,使得术者在术前可以对3D 打印模型观察分析,并模拟手术实施过程,对手术方案进行合理调整,制定最优的手术方案,充分发挥仿真模型的作用,提高手术的安全性及有效性。
3.2 两种术式的前景目前,3D打印导航模板辅助置钉术和计算机导航系统辅助置钉技术已广泛应用于脊柱疾病的手术治疗,其疗效也得到广大临床医师的认可。计算机导航辅助置钉技术的出现为很多复杂脊柱疾病的治疗开拓了更好的方法,未来应充分依靠数字化骨科技术、计算机及图像信息技术的迅猛发展,使其朝着精准化、微创化的方向迈进。虽然当前研究表明两种术式均可以提高椎弓根置钉的安全性和准确性,3D 打印技术的手术时间和平均置钉时间更短、置钉准确性较高,值得临床推广,但也应看到其局限性:(1)术前等待时间长:术前需要额外的时间进行导板设计、分析、制作、消毒等处理,过程较为复杂,增加了患者术前的等待时间,不适宜应用于急诊手术;(2)置钉的影响因素较多:首先,3D打印建模是基于薄层的CT 图像,而CT 图像的质量一定程度上限制了导板的精密度;其次,设计的导孔位置和方向出现微小偏差都可能导致术中置钉方位的巨大失误,导致置钉失败;最后,3D打印导板制作是根据患者仰卧位上拍摄的CT,手术时患者的体位是俯卧位,患者体位的改变以及麻醉后患者肌肉的松弛等因素,均会影响导板辅助置钉的准确性。为此,有学者在俯卧位上拍摄患者CT片,通过增加桥接点的方法,以提高置钉准确性[32];(3)缺乏规范标准:目前仍无针对3D 打印导板辅助置钉技术的相关规范标准,其潜在风险仍不明确。因此,未来仍需大量基础和临床研究来证实3D 打印技术在辅助椎弓根螺钉置入上的有效性及安全性,以便为脊柱疾病患者提供更加安全有效的手术方案。
3.3 局限性(1)纳入研究的数量较少,总样本量有待提高;(2)所纳入的文献只有3 篇随机对照试验,其他均为回顾性研究,导致本文的证据等级较低;(3)纳入的文献均为中文,未纳入外文文献,存在一定的选择偏倚;(4)平均置钉时间、手术时间、术中出血量及术中透视次数等结局指标之间异质性较高,通过敏感性分析及亚组分析均无法消除其异质性,结论尚存在争议,这可能与不同手术医师的手术熟练程度有关;(5)随访时间较短,导致两种术式的远期疗效无法进行比较。
3D 打印导航模板辅助置钉技术有更高的安全性及有效性,能显著缩短平均置钉时间和手术时间,提高置钉准确率,是一种较为安全的术式。本次Meta 分析纳入文献数量较少且质量较低,可能导致Meta 分析结果存在偏差,未来需开展大样本、多中心、具有前瞻性的研究加以验证。
猜你喜欢
现代企业(2021年2期)2021-07-20
冶金设备(2021年1期)2021-06-09
中华骨与关节外科杂志(2016年6期)2016-05-17
中华骨与关节外科杂志(2016年5期)2016-05-17
邯郸职业技术学院学报(2016年2期)2016-02-27
现代冶金(2015年4期)2015-02-06
首都外语论坛(2014年1期)2014-03-20
卫生职业教育(2014年24期)2014-03-19
中国中医药现代远程教育(2014年20期)2014-03-01
河南医学研究(2014年5期)2014-02-27