
某大型无人机气动特性及稳定性分析
2013-07-03 06:06郭卫刚张信明康小伟
兵器装备工程学报 2013年4期
郭卫刚,张信明,康小伟
(1.海军航空工程学院 飞行器工程系,山东 烟台 264001;2.海军旅顺军械技术保障大队92819 部队,辽宁 旅顺 116041)
无人机具有载人机所不具有的优势,其空间利用率很高,并且可以重复使用。由于不受人生理特点的限制,可以研制出具有如长航时和高过载等特点的飞行器[1]。在此正是利用这一特点,设计了一款具有长航时,高高度巡航的大型联接翼无人机,并对其气动特性和稳定性进行了分析。
联接翼本质上是一种气动与结构一体化布局概念,只有充分应用气动/结构一体化分析与优化技术才能获得全局最优方案[2-5]。研究表明联接翼飞机与常规飞机相比具有如下这些优点:重量轻;强度大;气动阻力小;较大的升力线斜率;较大的最大升力系数等[6-8]。本文在联接翼布局概念研究的基础上,设计了无人机翼的分析模型,并用亚音速定常流的涡格法按联接翼布局特点略作改进进行了计算[9,10]。
1 模型建立
设计的无人机总体翼展45 m,由前后两个机翼、双垂尾及位于机翼翼端的两片翼梢小翼组成。前后翼呈水平和垂直交错布局,其目的是为增加无人机气动稳定性。前后机翼都安装有开缝式襟翼,主翼襟翼为简单襟翼,后翼襟翼为后退式襟翼。其前后机翼呈交错式布局,其目的是为了减少两翼间产生的下洗涡流对机翼及副翼表面的气流干扰。依据仿生学中鸟类翅膀的造型设计了无人机机翼的外形布局,目的是增加整体气动布局的美感与动感。
主翼采用水平下单翼,变截面变后掠角设计。主翼根宽3.5 m,后掠角40°;主翼末端宽0.7 m,后掠角8°。
后翼宽1.0 m,前段上反18°,在离机体1/3 处下反18°。这种设计方式可使无人机具有更好的横航向稳定性。
翼梢小翼安装在主翼末端,翼根宽1 m,翼尖宽0.2 m。翼梢小翼可以阻断由机翼下面上绕的气流,减小机翼的诱导阻力,从而提高无人机的升阻比,同时增加航向稳定性,飞机整体布局如图1 所示。
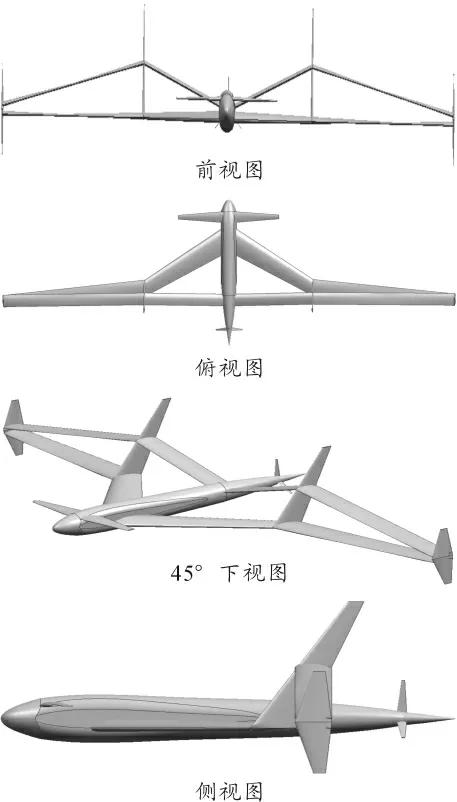
图1 无人机整体布局
2 数值方法
涡格法亦称旋涡网格法,它是用п 型马蹄涡来模拟升力作用并将之迭加作为基本解。涡格法是升力面理论中比较实用的数值计算方法。其基本做法:把一个完整的平面用线条分成许多四方形的网格,在每个网格的1/4 弦线处布置马蹄涡,在展向方向的中点处3/4 弦线位置布置控制点如图2所示[11]。对所有机翼表面上的控制点完成求和后,便可以获得一组满足不穿透机翼表面边界条件的有关马蹄涡强度的线性代数方程。这些涡强度都和机翼的环量有关,因而和机翼下表面的压强有关。对这些压强差进行积分,即可得到相应的合力和合力矩。求解主控方程时,连续分布在机翼表面上的附着涡是用有限数目的离散马蹄涡代替,各个马蹄涡放置在梯形面元里[12]。计算结果表明,这样选取控制点,后缘条件也能自动满足(图2)。
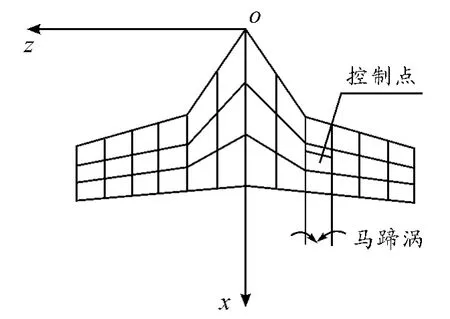
图2 马蹄涡分布
分别用γ1,γ2,γ3,…,γn来表示n 个涡格上离散马蹄涡的无量纲涡强Γ/lu∞。采用平面涡线的毕奥-萨瓦公式计算位于第j 个涡格上涡强为γj的马蹄涡在第i 个涡格控制点i 处产生的诱导速度uzij。很明显,uzij是三段涡线作用结果的累加和,可用下列表达式计算

式(1)中Cij称为影响系数,是γj=1 时在i 点产生的uZij/u∞值。Cij是一个无量纲几何量,可由i 点和j 点涡格上马蹄涡两个角点的x 和y 坐标计算而得。所在涡格上的马蹄涡在i 涡格控制点处所产生的y 向无量纲诱导速度值

Cij可由毕奥-萨瓦公式和几何关系求得。
将翼面线化边界条件应用于第i 个控制点上,得

n 个涡格上有n 个待定的γj,n 个控制点上有式(3)给出的n 个代数方程式,联立求解可得n 个γj值。在求得各个涡格上马蹄涡强γj后,机翼气动系数。
1)翼剖面的升力系数

式(4)中k 为涡格的行数。
2)机翼的升力系数

式(5)中m 为半翼涡格的列数。
3)翼剖面的俯仰力矩系数

式(6)中x'i为涡格附着涡线(1/4 弦线)中点的x 坐标。
4)机翼的俯仰力矩系数

式(7)中bA为机翼的平均气动弦长。
在计算过程中,为减小计算的工作量和工作时间,无侧滑情况下,可在其中的半个机翼上布置马蹄涡和控制点,而另外的半个机翼可通过移动控制点的方法来进行计算。采取这种计算方式,可在不影响计算精度的前提下,使计算量减少一半,从而缩短了计算时间,增加了工作效率。
3 建模与网格划分
利用Matlab 软件,根据无人机外形参数进行整体布局的建模并对整个机翼进行了网格的划分。网格划分时,在满足计算精度的同时计算时间又不能太长,如图3 所示。控制点分布情况如图4 所示。
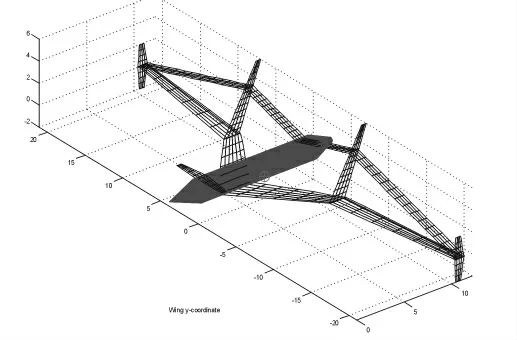
图3 机翼表面网格
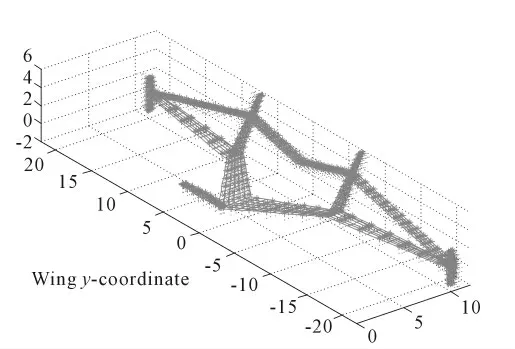
图4 控制点分布
4 计算结果与分析
由图5 可以看出,随迎角增大,升力系数逐渐增大,基本呈线性变化。图6 显示,阻力系数随迎角的增加也是不断增大的,通过计算可知,最大升阻比可达18.2,完全可以满足设计要求。

图5 升力系数随迎角变化
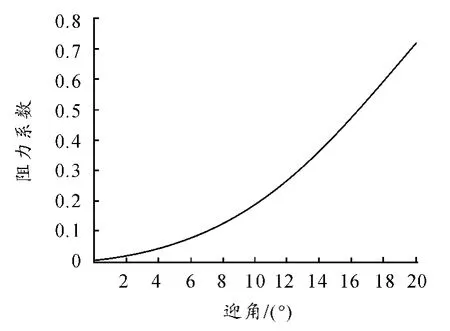
图6 阻力系数随迎角变化
由图7 可知,随升力系数增加,俯仰力矩系数呈逐渐减少趋势,其导数<0,说明飞机具有纵向静稳定性。同样,由图8 可知,随侧滑角增加,飞机的横向力矩系数和航线力矩系数都呈减小趋势,曲线基本呈线性变化规律,且各自导数<0 和<0,说明飞机具有横航向静稳定性[7]。
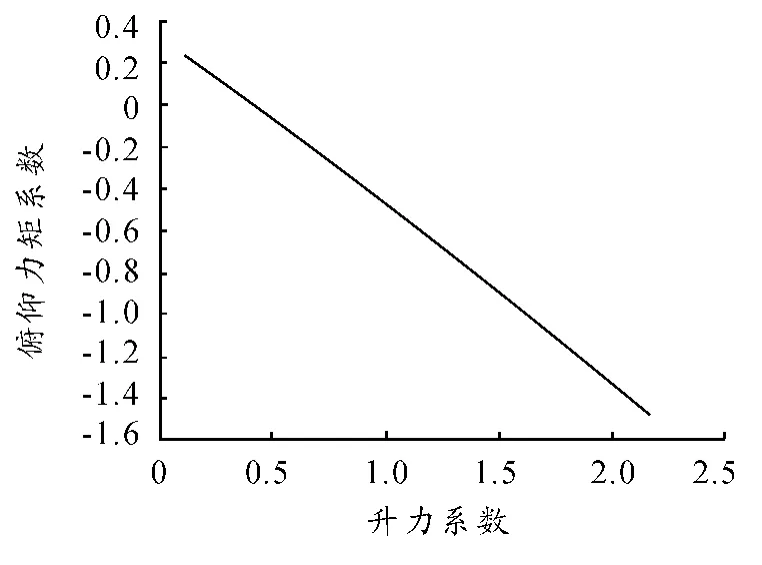
图7 俯仰力矩随升力系数变化
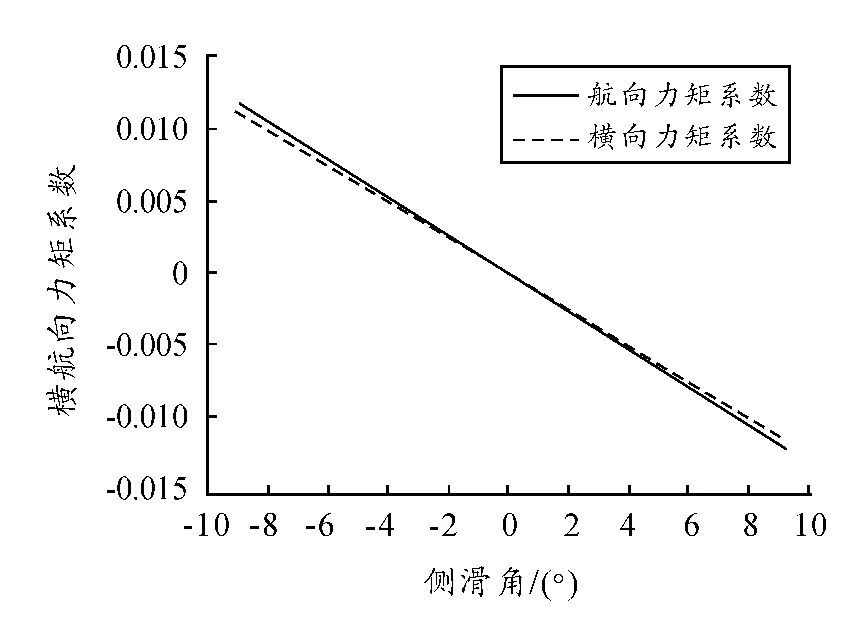
图8 横航向力矩系数随侧滑角变化
4 结束语
根据无人机特点,考虑长航时和高度巡航的要求,设计了一种具有联接翼气动布局的大型无人机。通过计算,其升力特性、阻力特性及稳定性均满足设计要求。其结果可为联接翼布局的大型飞行器气动性能和飞行控制的科学研究提供理论支持。
[1]甄云卉.无人机相关技术与发展趋势[J].兵工自动化,2009,28(1):14-16.
[2]Wolkovitch J. The Joined Wing: An Overview Journal of Aircaft[J].Journal of Aircraft,1986,23(3):161-178.
[3]Mary F.Structural Weight Comparison of a Joined Wing and a Conventional Wing[J].Journal of Aircraft,2002,19(6):485-490.
[4]Maxwell B. A Joined Wing Structural Weight Modeling Study[J].Journal of Aircraft,1982,19(6):485-490.
[5]Wolkovitch J,Lund D. Application of the Joined Wing to Turboprop Transport Aircraft[R].NASA CR-22187.
[6]潘家正.联结翼布局低速纵向气动特性研究[J].空气动力学学报,1996,14(1):81-82.
[7]潘家正,吕庆风.联结翼布局直接力控制可能性的初步探讨[J].飞行力学,1996,14(1):49-53.
[8]郭耀滨,王学俭,张滨江.前掠翼纵向气动特性的试验研究[J].航空学报,1987,6(6):52-56.
[9]徐华舫.空气动力学基础[M].北京:北京航空学院出版社,1987.
[10]钱翼稽. 空气动力学[M]. 北京: 北京航空航天大学,2005.
[11]陈再新,刘福长,鲍国华.空气动力学[M].北京:航空工业出版社,1998.
[12]熊海泉,刘昶,郑本武.飞机飞行动力学[M].北京:航空工业出版社,1990.
猜你喜欢
北京航空航天大学学报(2020年10期)2020-11-14
空间科学学报(2020年4期)2020-04-22
小读者(2019年24期)2020-01-19
意林·全彩Color(2019年4期)2019-05-11
科学Fans(2019年4期)2019-04-30
儿童故事画报·发现号趣味百科(2019年10期)2019-02-02
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2016年3期)2016-02-27
少儿科学周刊·儿童版(2015年11期)2015-12-17
航空学报(2015年4期)2015-05-07
