振动传感器温度灵敏度校准不确定度评定
2023-12-11 13:17田俊宏戴宜霖杨晓伟
宇航计测技术 2023年6期
朱 刚 ,田俊宏 ,戴宜霖 ,刘 鹏 ,杨晓伟
(1.北京航天计量测试技术研究所,北京 100076;2.中国运载火箭技术研究院,北京 100076)
1 引言
振动传感器的输出灵敏度是温度的函数,用于极端高低温环境下振动测量传感器,其高低温(例如650 ℃)灵敏度相对于常温灵敏度的偏差超过20%,需要在高低温环境下对振动传感器进行校准。多年来,北京航天计量测试技术研究所致力于开展振动传感器温度灵敏度相关校准方法研究和校准装置的研建工作[1,2],建立了完整的振动传感器温度灵敏度的溯源体系[3,4],制定了ISO16063-34 国际标准[5]。
ISO16063-34 推荐采用正弦逼近法在高低温条件下进行振动传感器校准,正弦逼近法源于ISO16063-11 推荐的“方法3”[6],已应用于国内外高、中、低频振动校准中,可得到振动传感器的灵敏度幅值和相移,并给出了相关不确定度[7]。为了说明振动传感器温度灵敏度校准装置量值传递的准确性,对装置的工作原理予以介绍,并着重对其测量结果的不确定度进行了分析。
2 振动传感器温度响应校准装置
振动传感器温度响应校准装置由激光干涉测量系统、标准振动台系统和温度控制系统组成。激光干涉测量系统包括激光干涉仪、数据采集系统和相关的正弦逼近法解算软件组成,激光干涉测量系统是振动测量的标准器,可直接溯源至长度和时间等基本量;标准振动台系统包括信号发生器、功率放大器和标准振动台,主要作用是对被校振动传感器施加振动激励;温度控制系统包括高低温试验箱、控温传感器等,主要作用是对被校振动传感器提供可控的温度环境。振动传感器温度响应校准装置的组成如图1 所示。

图1 振动传感器温度响应校准装置Fig.1 Calibration device of vibration calibration in fixed temperature
3 校准不确定度评定
3.1 测量模型
振动传感器灵敏度的幅值和相移均属于复合量,无法通过直接测量得到,灵敏度是由相关量的函数关系确定。
公式(1)是基于泰勒级数的一阶近似,被测量A的估计值a是由各输入量Ai的估计值ai按数学模型确定的函数关系计算得到。
按照不确定度传播定律,确定被测量A的的合成标准不确定度uc(a)与各不确定度分量u(ai)的关系为
由于各输入量之间不相关,根据函数误差理论推导出合成标准不确定度uc(a)可简化为
因此,只要分析各影响量对灵敏度幅值和相移测量不确定度的影响并合成,就可以得到系统的校准不确定度。
3.2 标准不确定度的A 类评定
用绝对法进行校准,选取温度150 ℃、校准频率为160 Hz、校准加速度为10 m/s2的条件下进行不确定度预评估。
(1)测量不确定度的A 类评定。
选用丹麦B&K 公司生产的8305 型参考加速度传感器,独立重复测量传感器的电荷灵敏度8 次,其结果如表1 所示。
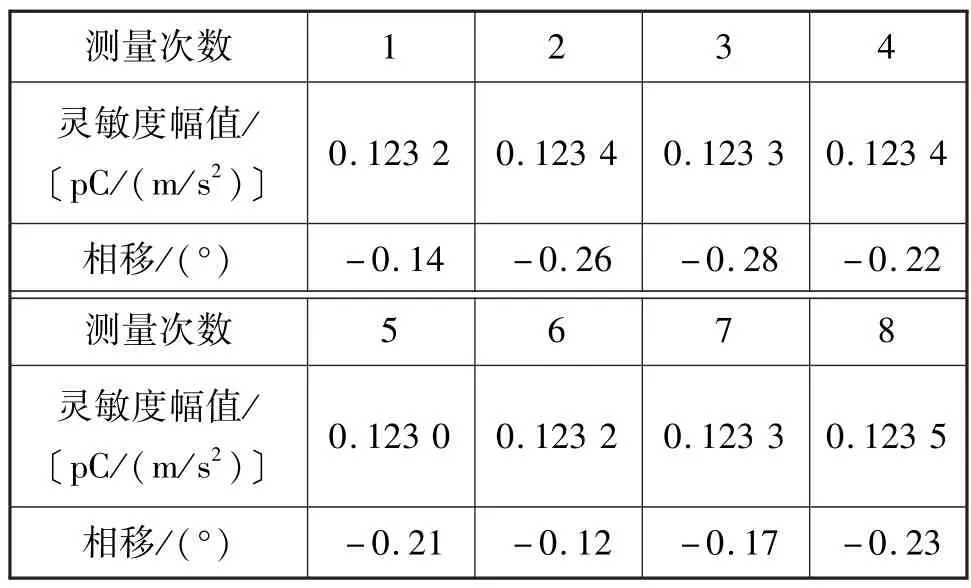
表1 参考加速度传感器测试数据Tab.1 Testing data of reference accelerometer
根据贝塞尔公式计算测量重复性引入的不确定度分量为:
灵敏度幅值:ua,A=0.13%;相移:uφ,A=0.020°。
(2)测量不确定度的B 类评定
①加速度计输出电压对测量的影响
加速度计输出电压为交流电压,本系统使用16位的数据采集系统,其电压准确度为0.05%,相移测量准确度为0.05°,二者服从均匀分布,包含因子为那么交流电压测量引入的测量不确定度分量为:灵敏度幅值:ua,B1=0.029%;相移:uφ,B1=0.029°。
②电压滤波对加速度计输出电压幅值测量的影响
加速度计输出电压受到低通和高通滤波器的影响,由于使用的数据采集器的带宽较宽,对电压测量产生的影响几乎可以忽略不计,估计其引入的幅值测量误差为0.02%,相移测量误差为0.02°,服从均匀分布,包含因子为其引入的测量不确定度分量为:
灵敏度幅值:ua,B2=0.012%;相移:uφ,B2=0.012°。
③横向、摇摆和弯曲加速度对加速度计输出电压测量的影响
振动台的横向运动、台面的摇摆和弯曲对于加速度计的输出会产生影响。根据评估,振动台的横向运动比一般不超过5%,台面的摇摆和弯曲一般不超过1%,加速度计的横向灵敏度比一般不超过2%,因此横向和摇摆等因素的影响为(5% +1%)×2%=0.12%,预估其引入的相移测量误差为0.2°,二者均服从矩形分布,取包含因子为3,那么横向、弯曲和摇摆等因素引入的测量不确定度分量为:
灵敏度幅值:ua,B3=0.04%;相移:uφ,B3=0.06°。
④干扰电压对加速度计输出电压测量的影响
干扰电压一般为测量系统的信噪比,使用的测量系统信噪比为80 dB,其对电压幅值测量的影响为0.1%,对相移测量误差的影响为0.05°,一般服从均匀分布,包含因子为那么干扰电压引入的测量不确定度分量为:
灵敏度幅值:ua,B4=0.056%;相移:uφ,B4=0.029°。
⑤干涉仪正交输出信号扰动对相位调制项幅值测量的影响
光电信号的输出幅值和相位差引起的影响,主要源于电路系统的噪声、电压幅值测量偏差及其背景噪声,干涉仪的正交信号扰动对干涉仪的相位调制项幅值测量引入的测量不确定度分量为:
灵敏度幅值:ua,B5=0.02%;相移:uφ,B5=0.02°。
⑥干涉仪信号滤波对位移测量的影响
干涉仪的输出信号为宽频带信号,受到采集系统带宽的影响,对输出信号具有滤波作用,从而影响其位移的解算。本装置使用的数据采集卡的带宽为10 MHz,远高于160 Hz,10 m/s2下的原始多普勒频移,估计干涉仪的信号滤波对其测量位移的测量引入的测量不确定度分量为:
灵敏度幅值:ua,B6=0.02%;相移:uφ,B6=0.02°。
⑦电压扰动对相位调制项幅值测量的影响
由于光电测量回路中的随机噪声,随机噪声主要源于电源的交流电噪声和激光干涉仪光路的热漂移等,电压扰动对干涉仪的相位调制项幅值测量的影响引起的灵敏度幅值测量偏差为0.05%,相移测量偏差为0.05°,一般服从均匀分布,包含因子为电压扰动对相位调制项幅值测量的影响引入的测量不确定度分量为:
灵敏度幅值:ua,B7=0.03%;相移:uφ,B7=0.03°。⑧干扰运动对相位调制项幅值测量的影响
源于激光反射的平面与干涉仪测量光点之间的相对运动,考虑到振动台的横向摇摆等运动,造成反射面与干涉仪光点之间产生相对运动,其引入的加速度幅值测量误差为0.05%,相移测量偏差为0.05°,一般服从均匀分布,包含因子为引入的测量不确定度分量为:
灵敏度幅值:ua,B8=0.03%;相移:uφ,B8=0.03°。
⑨温箱的温度波动对加速度测量的影响
用于高低温振动校准的温度试验箱的温度波动度为2 ℃,8305 每100℃灵敏度幅值变化为2%,相移变化为0.1°,可推算出在温度波动2 ℃的情况下,灵敏度幅值变化为0.04%,相移变化为0.002°,服从均匀分布,包含因子为的变化为的温度波动引入的测量不确定度分量为:
灵敏度幅值:ua,B9=0.023%;相移:uφ,B9=0.012°。
⑩温箱的温度均匀度对加速度测量的影响
用于高低温振动校准的温度试验箱的温度均匀度为±2 ℃,8305 每100°℃灵敏度幅值变化为2%,相移变化为0.1°,可推算出在温度偏差4℃的情况下,灵敏度幅值变化为0.08%,相移变化为0.004°,服从均匀分布,包含因子为温箱温度均匀度引入的测量不确定度分量为:
灵敏度幅值:ua,B10=0.046%;相移:uφ,B10=0.0023°。
⑪其他干涉效应对位移测量的影响
影响激光干涉仪测量的其他干涉效应包括,入射光反射光不重合、运动干涉、温度变化引起的激光波长变化、激光光线变化等。预估其他干涉效应引入的测量不确定度分量为:
灵敏度幅值:ua,B11=0.05%;相移:uφ,B11=0.05°。
⑫振动频率的测量
振动频率的准确与否关系到正弦逼近解算的准确度,由于解算出的信号为位移信号,换算到加速度信号需要频率信息加入计算,其对灵敏度幅值测量不确定度评估的贡献值为0.03%,其服从均匀分布包含因子为振动频率对相移测量并无影响,其引入的测量不确定度为0°。因此频率的测量引入的测量不确定度分量为:
灵敏度幅值:ua,B12=0.02%;相移:uφ,B12=0°。
综上所述,测量不确定度的B 类分量如表2 所示。
灵敏度幅值不确定度的B 类评定为:ua,B=
(3)合成标准不确定度
合成标准不确定度计算为:
(4)扩展不确定度
取包含因子k=2,扩展不确定度U计算为:
灵敏度幅值:Ua=2 ×ua,c=0.36%(k=2);相移:Uφ=2 ×uφ,c=0.22°(k=2)
4 结束语
介绍了一种基于正弦逼近法的振动传感器温度灵敏度幅值和相移测量不确定度的评定方法。准确有效地对测量不确定度进行评估,有助于建立振动传感器温度灵敏度的溯源体系,同时也为航空、航天、核工业等部门进行高低温下振动测试提供可靠的溯源保障。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
计测技术(2020年6期)2020-06-09
航天电子对抗(2019年4期)2019-06-02
制造技术与机床(2018年12期)2018-12-23
制导与引信(2017年3期)2017-11-02
成都信息工程大学学报(2017年1期)2017-07-21
电子制作(2017年7期)2017-06-05
电测与仪表(2016年15期)2016-04-12
探测与控制学报(2015年4期)2015-12-15
电源技术(2015年5期)2015-08-22