电解铝厂整流器室智能巡检系统的设计
2023-12-14 06:18关路远祝元兵张川登
轻金属 2023年11期
关路远,祝元兵,张川登
(1.沈阳铝镁设计研究院有限公司,辽宁 沈阳 110001;2.内蒙古电投能源股份有限公司,内蒙古 通辽 028000;3.云南文山铝业有限公司,云南 文山 663000)
电解铝生产用的整流器是为电解槽提供直流能源的重要设备,也是整个电解供电系统的“咽喉”,因为整流器一端(交流测)连接整流变压器,一端(直流侧)连接电解槽。整流柜一旦出现故障,既影响电网的稳定性,又导致电解生产系列停电[1]。因此,为保障整流器的稳定运行,需要工人每隔一段时间沿检修通道对整流器室内的整流器和控制柜进行巡检,查看设备运行状态并记录关键数据,形成点巡检记录。该巡检结果是对整流器运行状态的一种反馈。因此,整流器室巡检是电解铝企业生产过程中的重要维护操作内容之一,也是保障整流所整流器长期稳定正常运行的重要环节之一[2]。
本文设计和实现了一种电解铝厂整流器室智能巡检系统,以代替人工进行整流器室的巡检。该系统应用于电解铝厂整流所的整流器室内,既减少了工人的劳动强度,又极大提高了电解铝企业整流器室巡检的工作效率和质量。
1 总体解决方案
为降低整流器室巡检工作的劳动强度,提高巡检质量,本文设计并实现了一种电解铝厂整流器室智能巡检系统。该系统由机器人轨道、轨道式数据采集系统、软件系统、人机交互系统四部分组成。机器人通过自身携带的包括智能摄像头在内的各类传感器采集现场信息,并通过系统后台内置的智能算法对信息进行自动处理,最后形成报表和检测结论。最终实现由机器代替人工对整流器室进行日常巡检。电解铝厂整流器室智能巡检系统的总体架构,参见图1。

图1 总体架构图
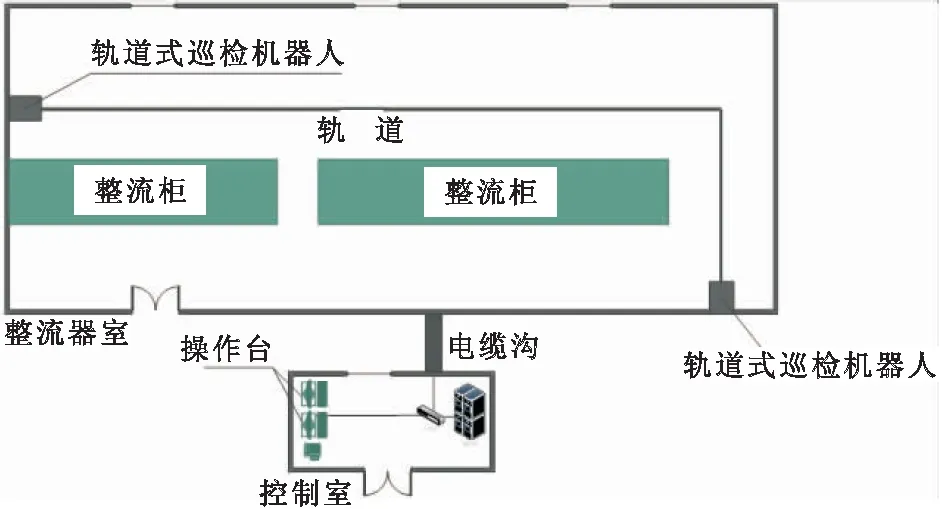
图2 智能巡检系统示意图
1.1 机器人轨道
机器人轨道采用高分子工程塑料和铝合金材料,强度高、承载力强、耐腐蚀[3]。机器人轨道固定于整流器室屋面,安装倾角≯5°。轨道式数据采集系统沿着轨道在整流室内运行。巡检机器人采用导轨滑触式供电方式实现24小时不间断供电。
1.2 轨道式数据采集系统
轨道式数据采集系统由两台巡检机器人组成。两台巡检机器人均通过内置的编码器进行定位,通过后台软件计算实现防碰撞。巡检机器人设置有高清摄像头、全向云台、噪声采集器、红外成像仪等,用于对二极管、电容器、互感器、水母排、水压表、水温表等设备进行红外温度采集识别和高清表计识别,并将数据传送到后台系统,当设备温度超过设定的报警值时,后台将产生报警信息并通知检修人员处理故障。机器人上安装烟雾传感器和有害气体检测传感器,实时监测火警及有害气体浓度,并将数据上传至后台处理。当有害气体浓度超过报警时,后台发出报警信息并及时通知运行人员,做出相应的应对措施。巡检机器人可以采集现场的数字仪表图像,段位式LED数码管显示仪表图像,传输至后台系统进行智能识别。
1.3 人机交互系统
人机交互系统设置在控制室内,采用触摸屏或工控机作为操作员站,轨道式数据采集系统通过电缆沟用光纤同控制室连接,集控室内放置操作员站、机柜、服务器、交换机等。人机交互系统与轨道式数据采集系统通过工业有线以太网进行双向数据交互,人机交互系统将分析并存储整流器室内的所有巡检数据,具备实时监控、巡检计划编制、遥控功能、巡检报表自动生成、故障分析告警、历史数据查询、双向语音交互等功能[4]。
2 功能设计
2.1 自我检测
轨道式数据采集系统具备自检功能,两台机器人在巡检工作任务执行前会进行自检,包括通信、供电、机械运动等功能,以及可见光高清摄像头、红外成像仪、噪声检测仪等检测部件,确保机器人各项检测功能正常。如果自检过程中发现异常,机器人通过本体指示灯就地指示,并向后台系统反馈各项监测数据。
2.2 巡检模式选择
采用两台巡检机器人,按照预设的巡检路线和巡检点,对整流器室区域内的设备进行全面巡检。操作人员可以事先在操作站上给两台机器人划分工作区域巡检,让机器人在各自的区域内进行巡检作业。也可以设置两台机器人轮流排班巡检,让机器人根据排班需求,在排班时间内对全区域进行巡检作业。两台机器人也可以互为备用巡检,当一台机器人故障或检修时,另一台机器人进行巡检作业。
该智能巡检系统的巡检模式分为全自动模式、半自动模式和手动模式。
2.2.1 全自动模式
全自动巡检模式下的操作人员需填写好巡检计划名称,选择巡检计划执行的机器人。每个机器人设有自己的归属区域。切换机器人时,巡检计划可以选择的采集点列表也会变更为相应机器人归属区域下的巡检点列表。设置任务重复周期即可。机器人根据任务预先设置的参数,按指定需求执行全自动巡检。
2.2.2 半自动模式
半自动巡检由操作人员在例行巡检计划以外额外设定巡检内容,机器人接到指令后,优先执行额外设定的巡视任务,执行过后再执行例行巡检任务。
2.2.3 手动模式
只要机器人处于基站信号覆盖范围内,操作人员就可通过操作站上的后台系统软件对机器人进行手动遥控,完成机器人前行、后退、左转、右转指令。该手动模式下,机器人可在操作人员遥控下,完成巡检工作。
2.3 数据采集
为保障整流器室内的设备正常运行,该整流器室智能巡检系统可实现以下巡检内容的数据采集。
(1)设备外观采集,通过机器人自带的高清摄像头发现设备表观缺陷;
(2)设备温度采集,通过机器人自带的红外成像仪及时发现设备温度超标情况;
(3)状态灯状态指示,通过摄像头查看仪表盘上各个指示灯是否指示正常;
(4)屏显示数读取,通过高清摄像头读取表盘数据传输至后台系统;
(5)整流器室中的烟雾、温湿度、气体含量检测,一旦发现超标即刻报警给操作人员;
(6)设备运行噪音检测,通过噪声检测仪获取噪声信号,发现超标及时报警;
(7)柜体局部放电检测,通过高清摄像头发现柜内的放电现象,一旦发现立刻报警。
2.4 异常报警
两台巡检机器人将获取的图像、温度、噪声、烟气含量、湿度等设备检测数据发送至后台系统,后台系统以历史数据为基础,结合实时数据,按照相关规范要求,通过预设的人工智能算法实现智能告警。当后台系统通过计算发现数据异常时,机器人发出告警信息给操作人员。系统支持二级告警:机器人本体级告警、后台系统告警。机器人本体检测到设备异常时,会进行声、光报警,并将报警信息上报到后台系统,联动后台系统进行声、光报警。
2.5 巡检报告
巡检机器人在执行完每一次任务后,会根据任务属性的不同而相应的自动生成不同的巡检报表。巡检报表格式可人工定制,根据习惯定制符合使用者阅读习惯的报表格式,可按需求汇总、分析生成日报、月报、季报、年报等。报表支持在线预览与下载,满足使用者不同的审阅情况。
3 系统软件设计
软件系统是本智能巡检系统的大脑,内置人工智能算法程序,该系统与现场巡检机器人通过工业有线网络进行双向数据交互,服务器内置的软件系统将分析并存储整流器室内的所有巡检数据,除具备实时监控、巡检计划编制、机器人控制、巡检报表生成、故障分析、历史数据查询、语音报警等平台软件的基本功能外,还可以实现仪表数值智能读取、开关状态智能识别、致热缺陷或故障智能判断、噪声异常定位等。
本系统软件体系结构共分四层,分别为数据访问层、业务逻辑层、服务层、表示层[5]。系统软件部分同现场巡检机器人通过以太网通讯。软件体系结构如图3所示,系统架构清晰,对外扩展方便。

图3 软件体系结构
4 结 语
本系统将巡检机器人、供电系统、软件系统、人机交互系统集成为一体。融合了恶劣环境下机器人系统可靠性技术、图片智能分析技术、热成像智能分析技术、机器学习技术、故障大数据诊断、多传感器信息融合技术等先进技术。本系统的应用成功实现了由机器人代替人工对电解铝厂整流器室内设备进行巡检,降低了工人的劳动强度,提高了巡检的效率和质量。
猜你喜欢
铝加工(2022年3期)2022-11-24
铝加工(2021年5期)2021-12-02
科学家(2021年24期)2021-04-25
中国有色金属(2020年14期)2020-12-09
读者·校园版(2018年3期)2018-01-18
风采童装(2016年2期)2016-08-02
通信电源技术(2016年4期)2016-04-04
电源技术(2015年1期)2015-08-22
电脑迷(2015年9期)2015-05-30
电测与仪表(2015年12期)2015-04-09